VOXL 2 Mini Onboard Sensors
Table of contents
Summary
Below describes the VOXL 2 Mini onboard sensors.
IMUs
Note the XYZ axis as drawn respresent the IMU data as reported by the voxl-imu-server MPA service, not the physical orientation of the IMU on the PCB. This aligns with the FRD reference frame when mounted on a drone in the typical orientation such as on the Sentinel reference drone.
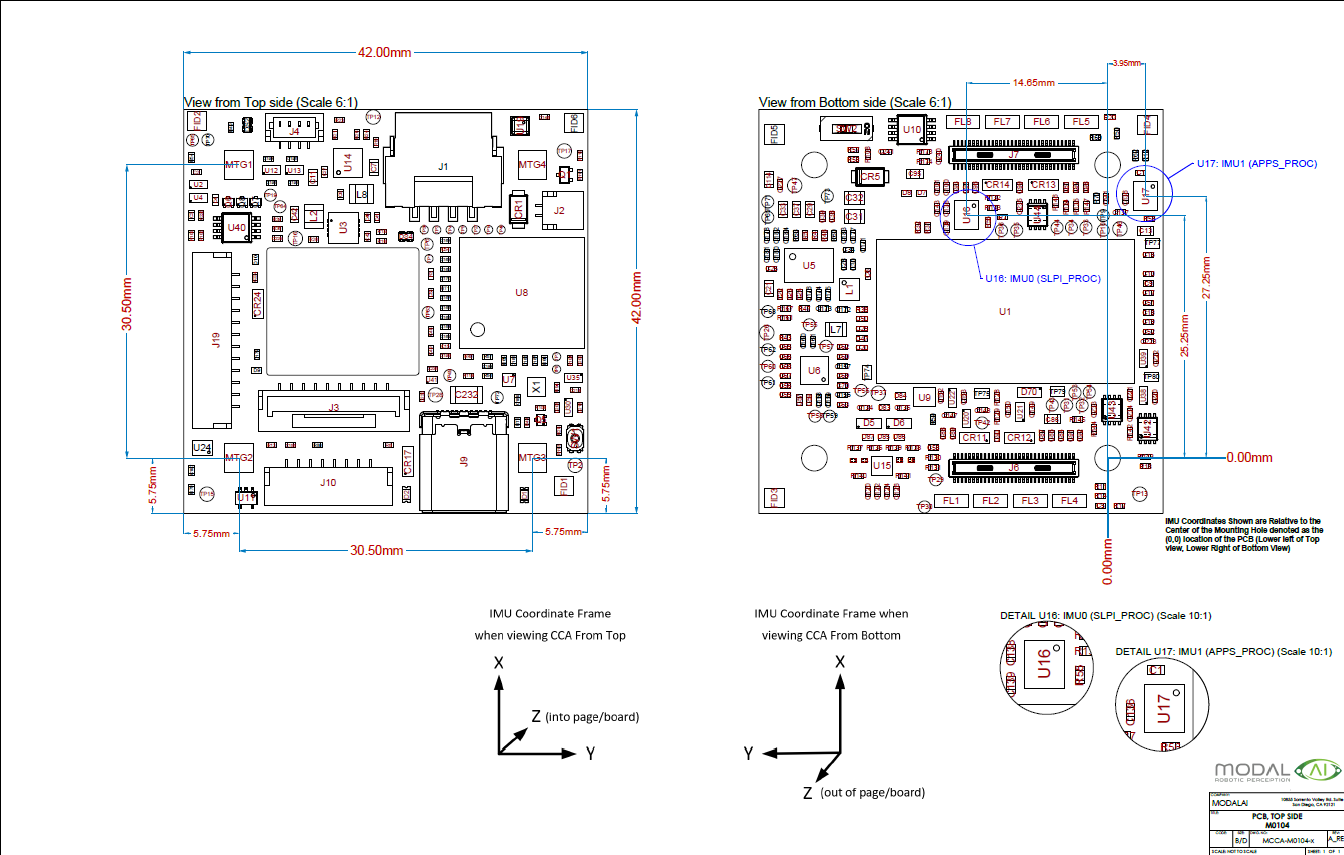
IMU Orientation Image Downloadable File Link Here
| Name / Designator | Description | Interface | MPA Pipe |
|---|---|---|---|
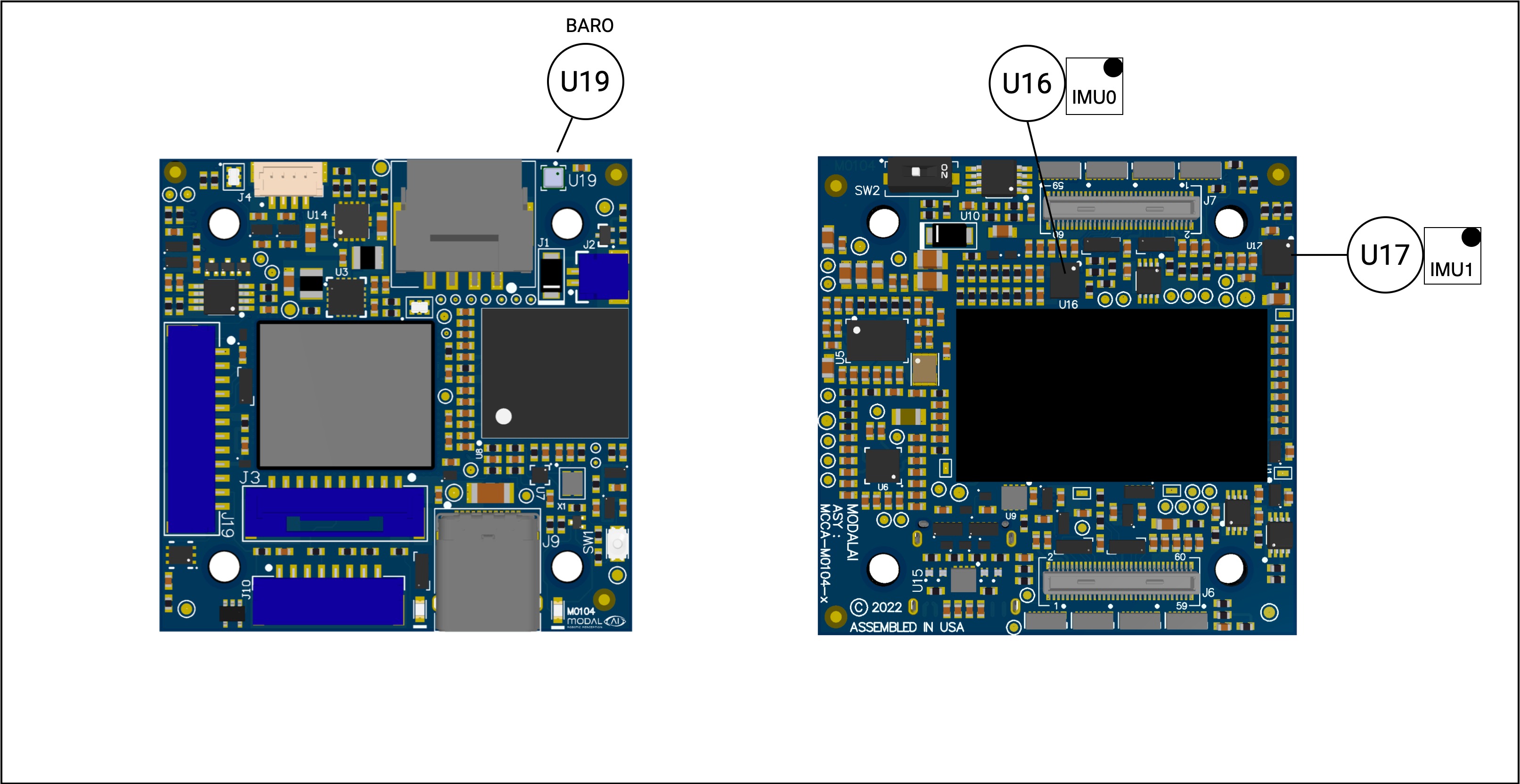
| PX4 IMU / IMU0 / U16 | TDK ICM42688p | SSC_QUP5, SPI, SLPI (sDSP) | /run/mpa/imu_px4 |
| Apps Proc IMU / IMU1 / U17 | TDK ICM42688p | /dev/spidev3.0, SPI | /run/mpa/imu_apps |
Barometers
| Name / Designator | Description | Interface |
|---|---|---|
| PX4 Baro 0 / BARO1 / U19 | TDK ICP-10100 | SSC_QUP4, I2C, SLPI (sDSP), Addr: 0x63h |