Calibrate Cameras
Table of contents
- Overview
- Recommended Chessboard
- Command Line Options
- Monocular Calibration Process
- Stereo Calibration Process
- Source
Overview
VOXL Camera Calibration is a package in voxl-suite >= 0.5.0 for calibrating cameras on-board on voxl. If you are on an older voxl-suite image, we recommend that you upgrade and use this tool, but you can find a link to the deprecated ROS calibration process below.
Use of this tool requires the ability to view the overlay image coming off of voxl. We recommend using the VOXL Web Portal to view the overlay images.
Recommended Chessboard
The size and spacing of the chessboard is configurable on the command line. Internally, ModalAI uses a 5x6 with 65.5mm spacing on a stiff, foam-backed board with matte finish to reduce glare. This is the default used by the calibrator tool unless a different size and spacing is set.
Note that the size is based on OpenCV’s definition of a chessboard and matches the ROS calibrator tool. That is to say, the size (4x7, 5x6, etc) is the count of the number of inner corners which is what is actually being detected by the algorithm (not number of squares). This is usually #squares-1 noting that partial outer squares are okay. A white border around the chessboard make the detector more robust and tolerant to lighting. This is one of the 5x6 chessboards used at ModalAI:
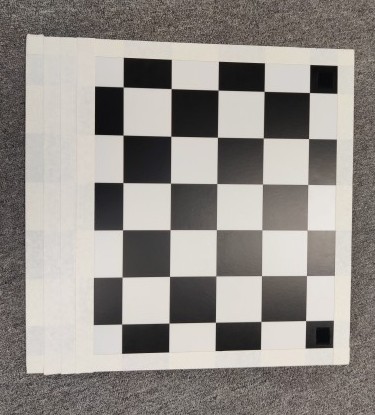
Here is an image for a 6x9: https://raw.githubusercontent.com/opencv/opencv/4.x/doc/pattern.png
{kind=link}
Command Line Options
| Short Option | Long Option | Effect |
|---|---|---|
-e | --extrinsics-only | For a stereo pair, pull an existing intrinsics file and only run extrinsics |
-f | --fisheye | Tells opencv to use fisheye parameters for finding the board and calibrating |
-h | --help | Prints this help information |
-l | --length | Specify the edge length of a single square in meters (default 0.0655 |
-m | --mirror | Mirror the overlay output, this is just personal preference |
-s | --size | Specify the number of corners for the calibrator to look for (default 5x6) |
-t | --threshold | Display the thresholded image in the overlay (debug tool for lighting conditions) |
Example using a 6x8 Checkerboard with 0.038m Squares
Tracking:
voxl2:/$ voxl-calibrate-camera tracking -f -s 6x8 -l 0.038
or
Stereo:
voxl2:/$ voxl-calibrate-camera stereo -s 6x8 -l 0.038
Example using a 6x8 Checkerboard with 0.038m Squares
Tracking:
voxl2:/$ voxl-calibrate-camera tracking -f -s 6x8 -l 0.038
or
Front Stereo:
voxl2:/$ voxl-calibrate-camera stereo_front -s 6x8 -l 0.038
or
Rear Stereo:
voxl2:/$ voxl-calibrate-camera stereo_rear -s 6x8 -l 0.038
Monocular Calibration Process
To calibrate a monocular camera, such as the tracking camera on voxl, you can simply run the command: voxl-calibrate-camera tracking --fisheye, open the web portal, and fill the rectangles like such:
![]()
Once you’ve filled all the rectangles, the calibration will run, which will take a few seconds, and then the calibration will be printed to the terminal window. If the calibration was successful, it will also write to /data/modalai/opencv_{camera-name}_intrinsics.yml
voxl2:/$ voxl-calibrate-camera tracking -f
Matrix
[277.7090664510777, 0, 290.6865358454301;
0, 277.5687125242331, 240.1597738541476;
0, 0, 1]
Distortion
[-0.006319990900085937;
0.00155893534296691;
0;
0]
distortion_model: fisheye
Re-projection error reported by calibrateCamera: 0.172684
Calibration Succeded!
Writing data to: /data/modalai/opencv_tracking_intrinsics.yml
Saved!
Exiting Cleanly
NOTE:
When calibrating the standard OV7251 Tracking Camera, make sure to use the -f or --fisheye flag to make sure that the calibrator uses the fisheye lens distortion model.
Stereo Calibration Process
To calibrate a stereo camera, you can simply run the command: voxl-calibrate-camera stereo, open the web portal, and fill the rectangles like such:
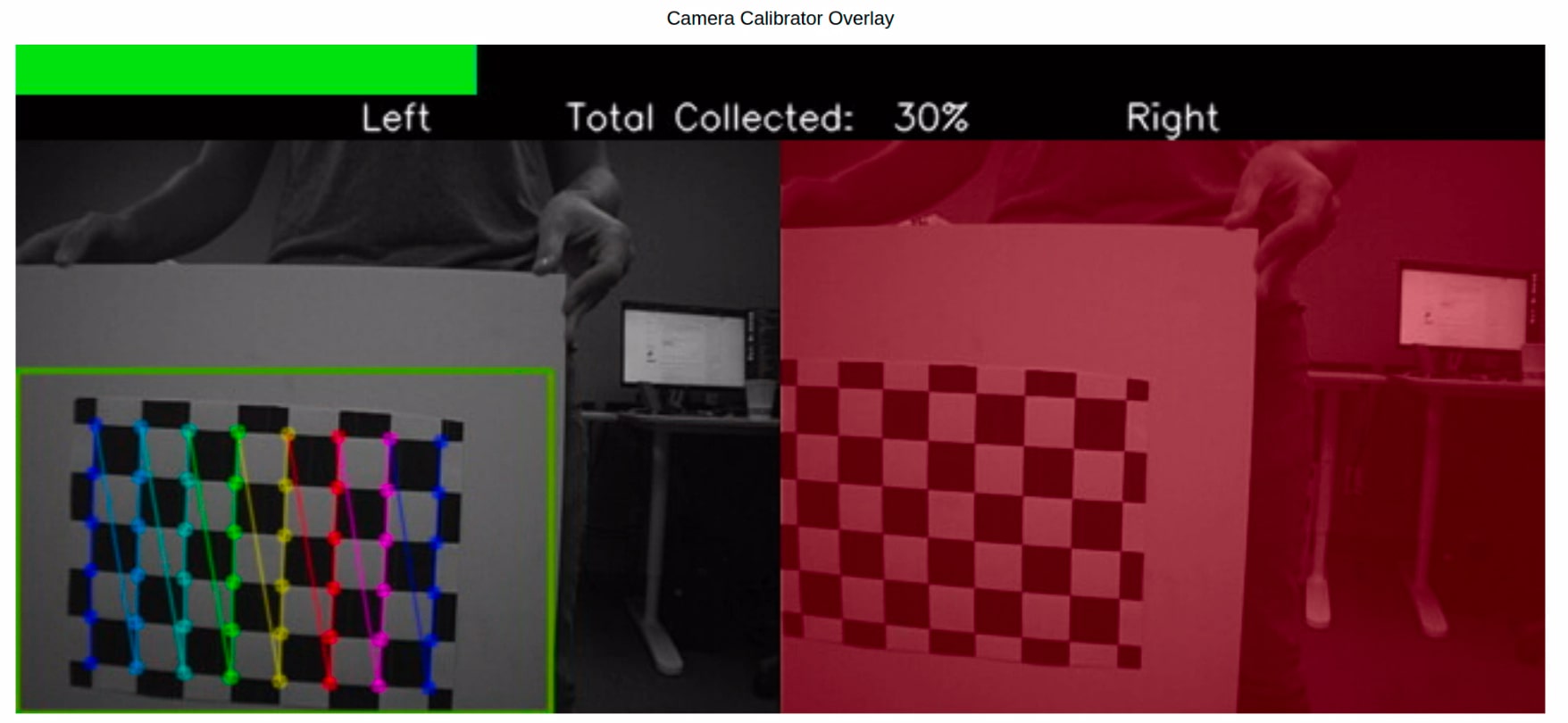
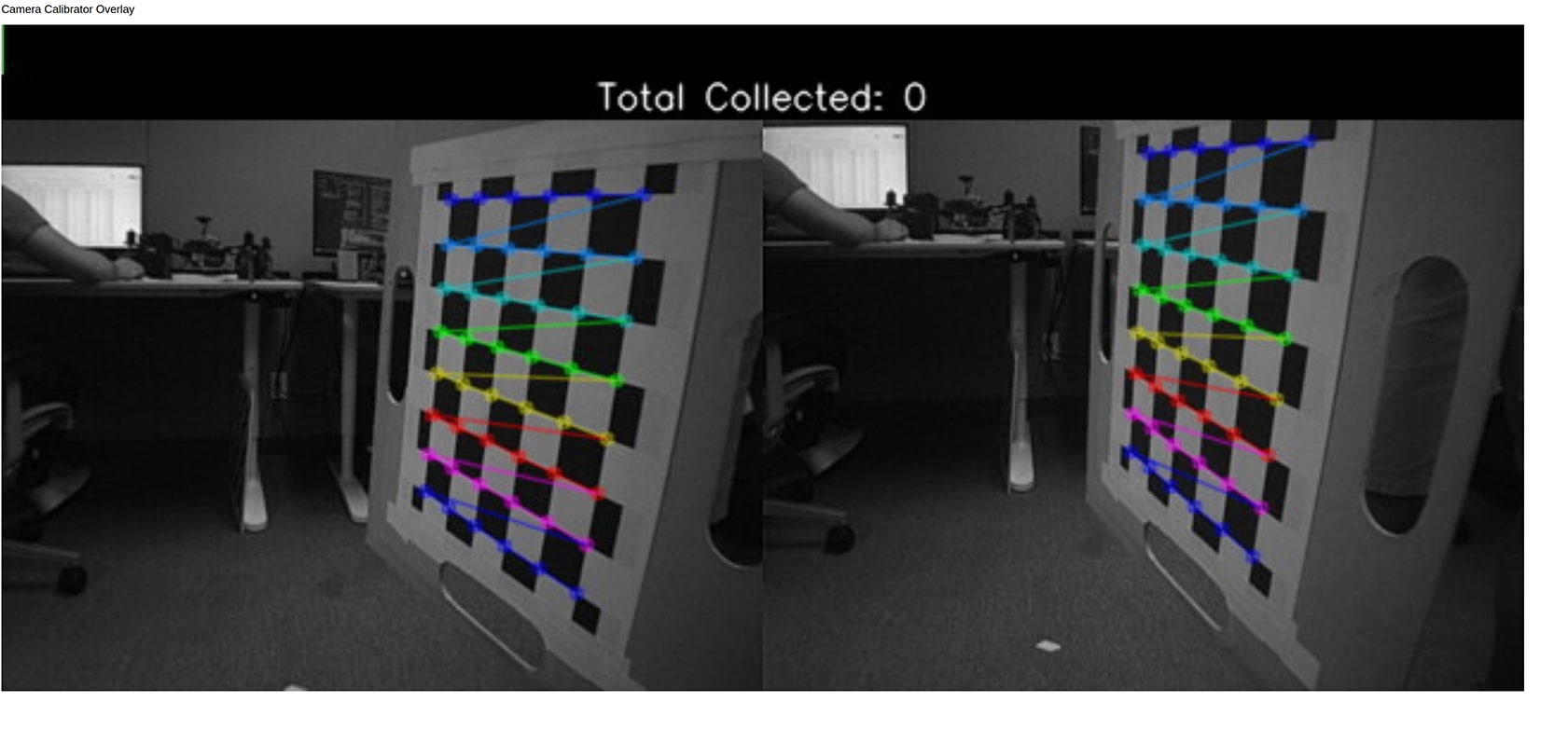
The stereo calibrator calculates the intrinsics for each camera separately, so you will need to fill in all of the left rectangles, then all of the right rectangles. Once the intrinsics are done, you will have to manually add the extrinsic samples. To do so, hit enter in the terminal window that is running the calibrator to take a frame, once you have enough frames, type stop. These images do not have pre-specified locations since different orientations lead to different requirements. It is STRONGLY recommended that you do 2 images for the extrinsics, one skewed image on either side of the frame, like such:

If everything has been done properly, you will see output like this:
voxl2:/$ voxl-calibrate-camera stereo
Sampling overlapping images now
Enter an empty line to take a sample or "stop" to finish sampling
Taking Frame
Taking Frame
stop
Stopping sampling
Calibrating Left Camera
Matrix
[493.7322756669245, 0, 306.7896643027532;
0, 493.1380517350153, 217.4680594645219;
0, 0, 1]
Distortion
[-0.1698366125016952;
0.06988854948207439;
-0.001138684086637882;
-0.0007932118450081079;
0]
distortion_model: plumb_bob
Re-projection error reported by calibrateCamera: 0.177678
Calibration Succeded!
Calibrating Right Camera
Matrix
[496.1483207581481, 0, 320.9542358074322;
0, 495.5756728109903, 223.7654477880258;
0, 0, 1]
Distortion
[-0.1725992238299667;
0.06664783196280108;
-0.00172072316840736;
-0.0004606934467252117;
0]
distortion_model: plumb_bob
Re-projection error reported by calibrateCamera: 0.179598
Calibration Succeded!
Calibrating Extrinsics
2 frames will be processed
R
[0.999777546053251, -0.0004080345076243199, 0.02108771954432934;
0.002055883177889161, 0.9969371281114418, -0.07818015053240687;
-0.02099123036171473, 0.07820611293723473, 0.9967161943839129]
T
[-0.08011754799309605;
-0.001690038045698758;
-0.0008435695774040179]
Re-projection error reported by stereoCalibrate: 0.259720
Extrinsics Calibration Succeded!
Saved intrinsics to: /data/modalai/opencv_stereo_intrinsics.yml
Saved extrinsics to: /data/modalai/opencv_stereo_extrinsics.yml
Exiting Cleanly
Stereo Calibration Video Tutorial
Source
Source code available on Gitlab.