Flight Core Connections
Table of contents
Setting up the Connections
Before configuring the Flight Core’s software, we suggested mounting it to your airframe and make sure the airframe is physically ready to fly. You should connect at least the following items to proceed through this getting-started manual.
Due to supply chain issues, the colors of the connectors on Flight Core are subject to change. If the colors of the connectors on your flight core are different, please disregard.
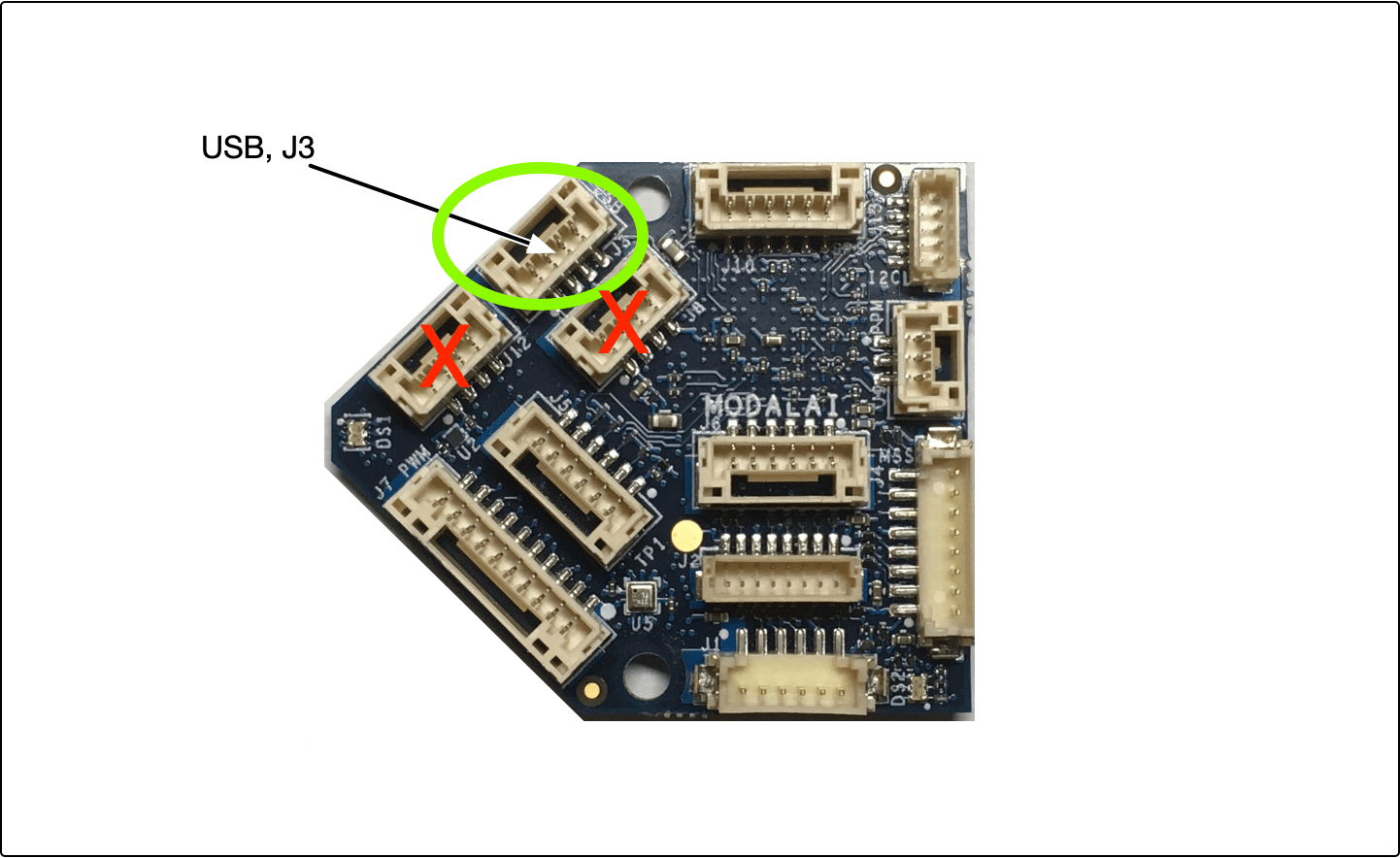
USB
Using the MCBL-00010](/cable-datasheets/#mcbl-00010/) (JST to microUSB female) included in the
FC-R1kit + a micro USB cable, you can connect to a host computer running QGroundControl over USB.- NOTE - it’s possible to inadvertently plug the USB cable into the wrong port which can lead to issues. Please be cautious here!
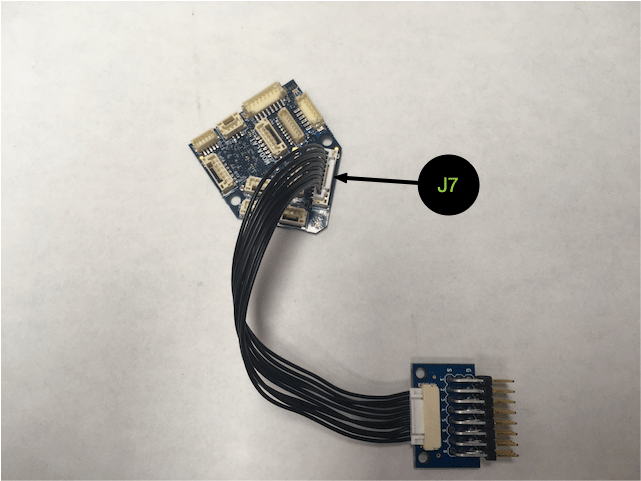
ESCs/Motors
- Using the MCBL-00004 cable included in the
FC-R1kit, connect the Flight Core board’sJ7to the PWM Breakout Board - From the PWM Breakout Board, you can connect to your ESCs/Motors
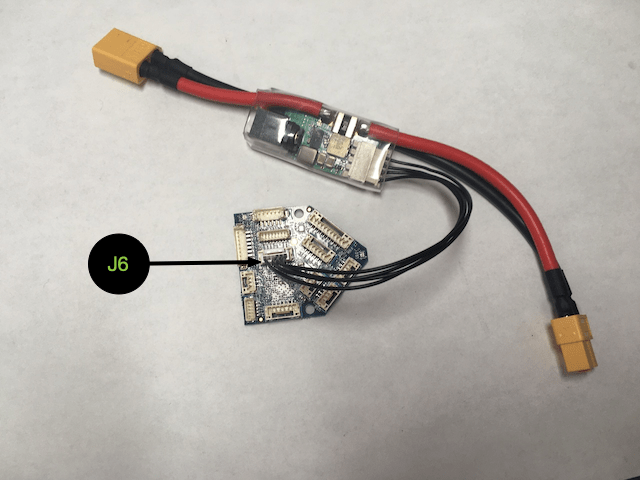
Power Supply
- Using the MCBL-00003 cable included in the
FC-PWRkit, connect the Power Module to the Flight Core’sJ6connector - Connect the Power Modules’s output to your power distribution method (e.g. for an s500 airframe, you’d connect to the PCB Center plate)
RC Receiver
Spektrum Receiver (Default)
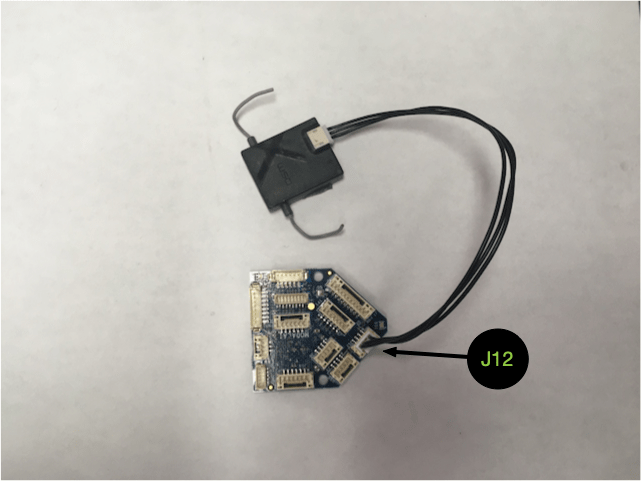
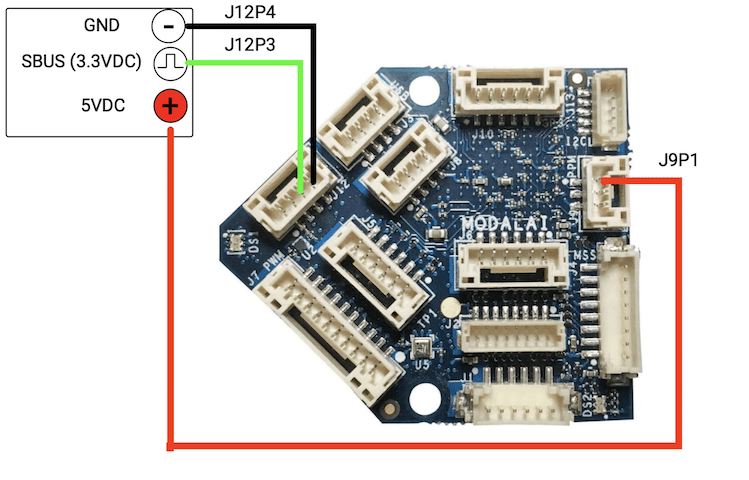
Using the MCBL-00005 cable included in the FC-R1 kit, connect to an RC Receiver (e.g. a Spektrum Satellite) to Flight Core’s J12.
FrSky Receiver (Optional)
Graupner Receiver (Optional)
MZ 12 Pro, Setup Guide Video
GPS
If you wish to use a GPS/magnetometer you should attach it now as we will reach the calibration step shortly.
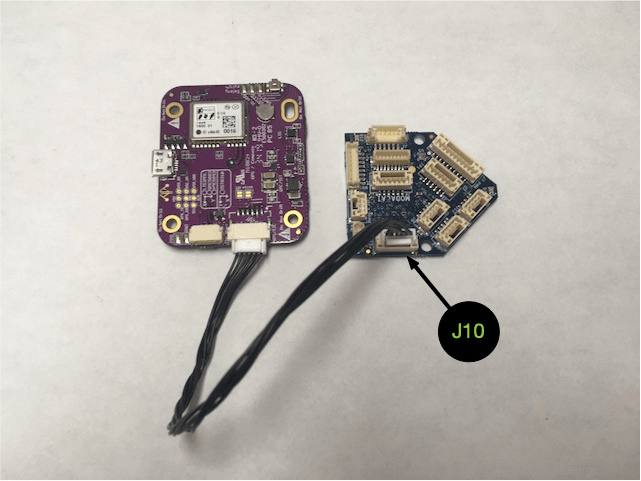
A DroneCode standard 6-pin GPS can be used and connected to Flight Core’s J10. For example, the mRo GPS u-Blox Neo-M8N Dual Compass LIS3MDL+ IST8310 or Pixhawk4 2nd GPS Module
Wireless Telemetry Link
VOXL
We recommend using a VOXL as your wireless telemetry link, which supports both WiFi and LTE. If you intend to use a VOXL as the primary wireless telemetry connection, you should make sure it’s software is up to date has voxl-vision-hub installed and configured with the IP address of your ground control computer already set.
Captured in the how to connect VOXL to Flight Core section, you can see how to use the MCBL-00007 cable to connect the Flight Core’s J1 to VOXL’s J12
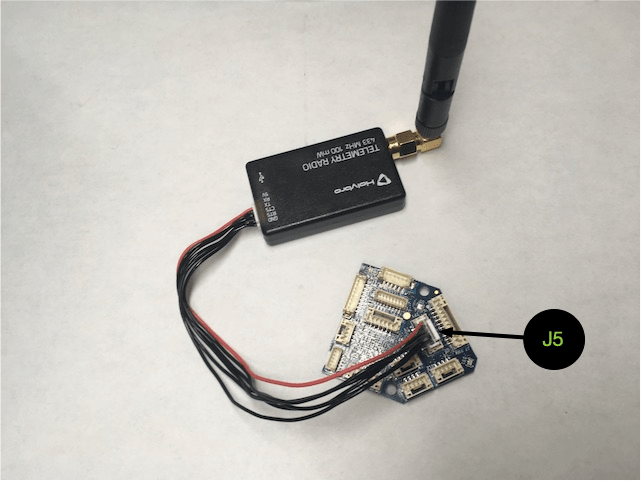
SiK Based Telemetry Radio
Alternatively, you can use a SiK point-to-point telemetry link like the Transceiver Telemetry Radio V3 using the included cables in that kit and connect to Flight Core’s DroneCode standard J5 connector