Qualcomm Flight RB5 Connect to GCS
Update 2022-07-20: the Qualcomm Flight RB5 vehicle is now supported by the VOXL SDK! Please see here from more information
VOXL SDK QGroundControl Guide can be found here
Connect to QGroundControl
We’ll use QGroundControl for the GCS. First, verify that PX4 is running on your Qualcomm Flight RB5 using the following
voxl-inspect-services
If it is not running, it can be enabled to run on boot using the following:
systemctl enable voxl-px4
Network Layout
In order to connect to QGC, ensure that your host computer is connected to the same network as your Qualcomm Flight RB5.
If PX4 is running and both devices are connected to the network then the Qualcomm Flight RB5 should automatically detect the host PC running QGC and connect.
Connecting to QGC over 5G
First follow the steps to connect to the 5G network.
In order to connect QGC over the LTE or 5G network, a VPN will be needed in order to complete the bridge from the cellular network to the
A typical use case of an LTE connection is to connect a drone to a Ground Control Station (GCS) such as QGroundControl. Typically the GCS is also connected to an LTE network. In this case, both the drone and the GCS have been assigned IP addresses on the LTE network that are private to the carrier network. This prevents the drone from directly connecting to the GCS since their IP addresses are not visible to each other over the internet.
There are a variety of ways to solve this issue. ModalAI uses a VPN as the preferred solution.
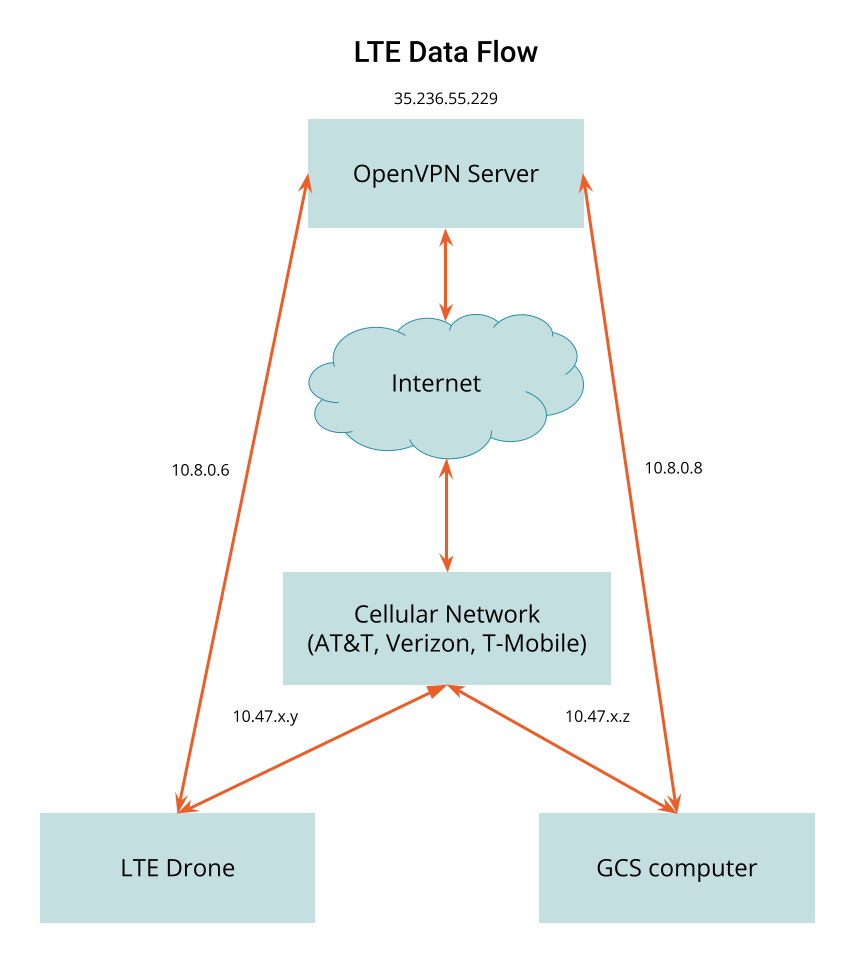
This diagram shows how the VPN solution works. In this example a server is allocated with a static IP address, 35.236.55.229. For RB5 based devices, we prefer to use Tailscale as our VPN provider.
If you prefer to host your own server, you can do so with Google Cloud Platform, Amazon Web Services, Microsoft Azure, etc. Ubuntu is our preferred OS for our servers. Our self-hosted VPN server is setup using the OpenVPN software package.
In the example above, once the drone has connected to the AT&T network, it obtains the IP address 10.47.x.y and the GCS, once connected, obtains the address 10.47.x.z.
With the VPN server software running on the cloud server and VPN client software on both the drone and the GCS, the devices can now connect and get VPN IP address assignments. In this diagram, the drone is assigned 10.8.0.6 and the GCS is assigned 10.8.0.8. The drone can now communicate directly to the GCS using the 10.8.0.8 IP address.
It is desirable for the drone and the GCS to always get the same IP address when connecting to the VPN. This is possible by assigning each separate network endpoint a unique security certificate. When each endpoint connects using it’s certificate it can be configured to receive the same address every time.
Tailscale VPN Setup
In order to install the Tailscale client on RB5, follow these instructions: Installing Tailscale on Ubuntu 18.04
Tailscale is extremely simple, fast, and straight-forward to setup. It’s free tier is a solid choice for robotics use cases.
Confirm Connection
If connection succeeds, you should get a connected status in QGC.