VOXL 2 Mini Remote Controller Configurations
Table of contents
Summary
We are working to expand the capabilities of VOXL 2 every day. The built-in PX4 flight controller enables industry leading SWAP for an autonomous flight controller, but not every interface and flight controller are supported yet. This page provides an overview of available connectivity. If this connectivity is insufficient for your application, VOXL 2 is a world-class companion computer for autonomous navigation and AI when paired with an external flight controller.
Remote Controller Options for Built-in Flight Controller
| Interface | Protocol | Includes Telemetry | Instructions | Adapter | Example Hardware |
|---|---|---|---|---|---|
| ELRS | CRSF/UART | Yes | CRSF raw | Beta FPV | |
| TBS Crossfire | UART | Yes | MAVLink and CRSF raw | Nano | |
| WiFi | IP / Mavlink | No | VOXL 2 Wifi Dongle User Guide Connect QGC over WiFi | ||
| Microhard | IP / Mavlink | No | Microhard Add-on Manual | ||
| Doodle Labs | IP / Mavlink | No | Doodle Labs User Guide | ||
| Cellular | IP / Mavlink | No | 4G or 5G with voxl-vpn | ||
| Spektrum (DSMX) | UART | No | Not yet supported | ||
| Graupner | No | Not yet supported | |||
| FrSky | No | Not yet supported | |||
| Futaba | No | Not yet supported |
CRSF
Hardware
PLEASE NOTE: default CRSF baud rate used by voxl-px4 is 420k.
Tested hardware:
- TBS Crossfire Nano Rx (in both CRSF and MAVLink mode)
- Beta FPV 900 Nano
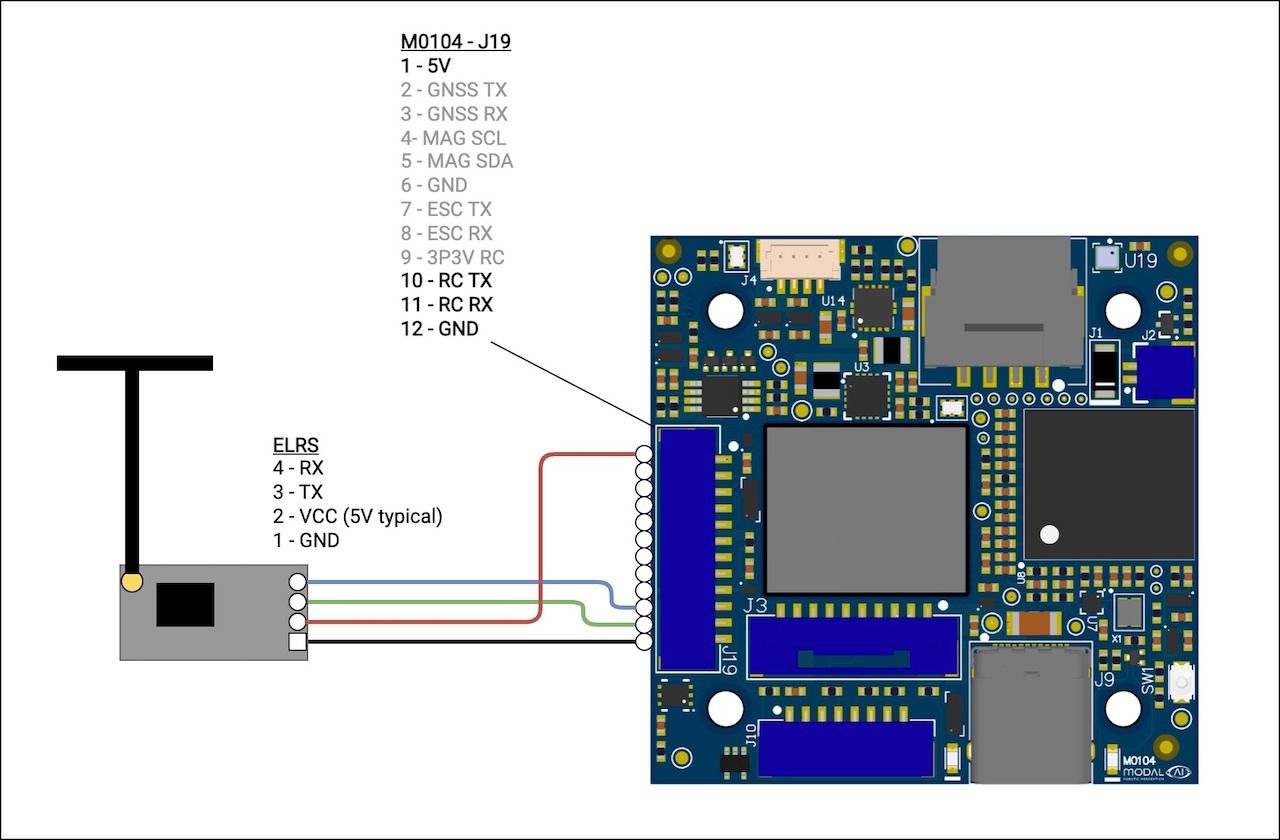
M0104 J19:
- Connector on board : SM12B-GHS-TB(LF)(SN)
- Mating connector : GHR-12V-S
Software
Setting PX4 to Use CRSF
See file at /etc/modalai/voxl-px4.conf.
This file is loaded from boards/modalai/voxl2/target/voxl-px4.
The previous script calls this script with command line args to start CRSF, boards/modalai/voxl2/target/voxl-px4-start.
Checking Status
The px4-listener input_rc or px4-listener rc_channels command can be used to trouble shoot, if neither have been published it’s likely the receiver has yet to get RC data or the serial link isn’t working.