How to Run MAVROS
Tutorial Video
Overview
This tutorial demonstrates how to fly a VOXL2 / RB5 Flight based drone autonomously in a figure 8, using MAVROS.
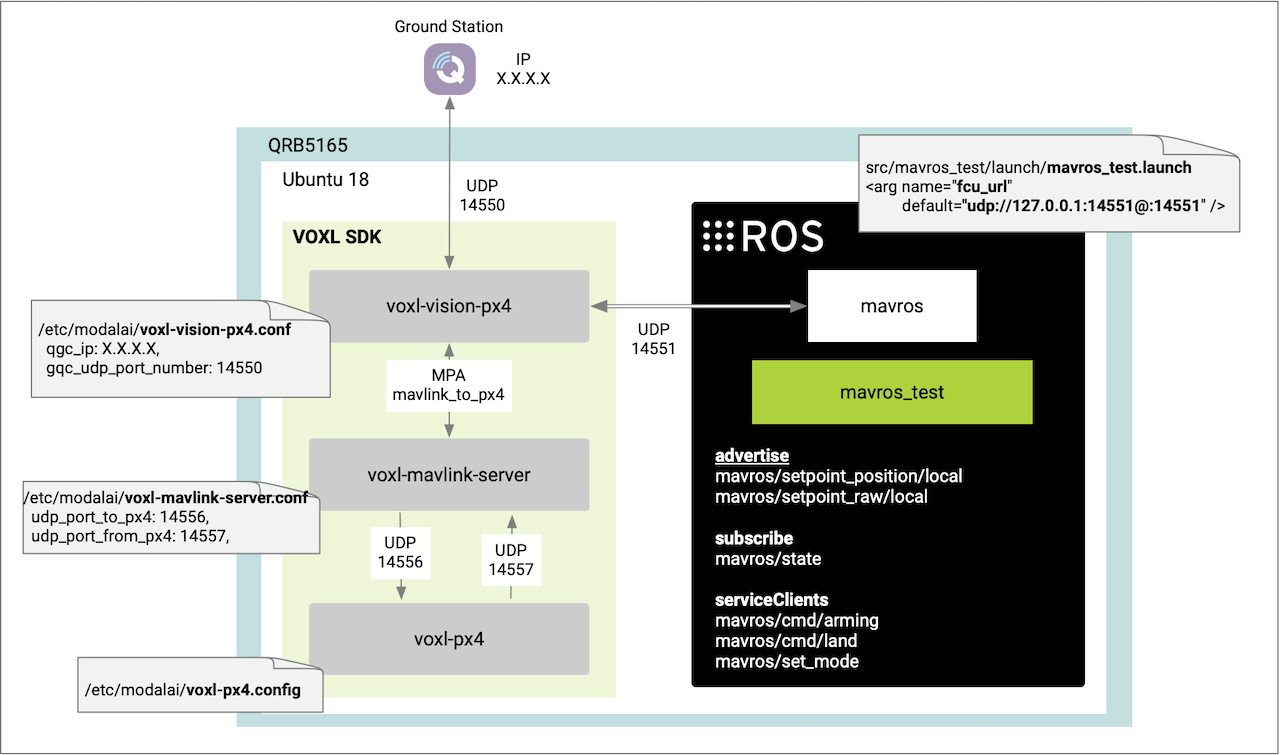
For this setup, MAVROS is installed and runs on VOXL 2 / RB5 Flight. Additionally, the voxl-px4, voxl-vision-hub and voxl-mavlink-server background services will be running. This provides the PX4 flight controller, Visual Inertial Odometry (VIO) for PX4, and manages the mavlink telemetry between the ground control station remotely and ROS locally.
At the end of this tutorial, your drone will be flying autonomously. Please only run this in a safe location away from people and wear protective eyewear!!
Block Diagram
TODO: UPDATE DIAGRAM
Prerequisites
Install ROS Melodic
- Have vehicle connected to the internet
- Install ROS Melodic on VOXL 2 following this guide
Install MAVROS Dependencies
- Install the following packages MAVROS packages:
apt-get install ros-melodic-mavros ros-melodic-mavros-extras ros-melodic-control-toolbox
- Install
GeographicLib dataset(which is a dependency of MAVROS, for whatever reason):
cd /opt/ros/melodic/lib/mavros
./install_geographiclib_datasets.sh
Configure voxl-vision-hub localhost
Use voxl-inspect-services to validate voxl-vision-hub is enabled and running.
Edit the configuration file:
vi /etc/modalai/voxl-vision-hub.conf
We will check the following
qgc_ip- should be your host PCs IP address where the Ground Control Station isen_localhost_mavlink_udp- set to true to allow UDP MAVLink comms on localhostoffboard_mode- set to “off”. Whenoffboard_modeis on, this enablesvoxl-vision-hubto command the drone to move, which we don’t want (we only want MAVROS to be sending movement commands).
Validate your configuration file
"qgc_ip": "X.X.X.X",
"en_localhost_mavlink_udp": true,
...
"offboard_mode": "off"
Configure voxl-mavlink-server
Use voxl-inspect-services to validate voxl-mavlink-server is enabled.
mavros_test Project (simple-example)
Checklist
- Make sure your drone can arm
- Have RC transmitter bound to vehicle with ‘offboard’ and ‘manual’ mode
- This
simple-examplecan be done on the bench WITHOUT PROPS
Overview
This simple-example branch demo project:
- waits for
offboardmode - arms the vehicle
- disarms the vehicle
Build
On VOXL 2 / RB5 Flight, clone the simple-example branch of the mavros_test project. In this example, we’re cloning to /home:
cd /home
git clone -b simple-example https://gitlab.com/voxl-public/support/mavros_test.git
Build the project:
cd /home/mavros_test
./build.sh
Base path: /home/mavros_test/catkin_ws
Source space: /home/mavros_test/catkin_ws/src
Build space: /home/mavros_test/catkin_ws/build
Devel space: /home/mavros_test/catkin_ws/devel
Install space: /home/mavros_test/catkin_ws/install
Creating symlink "/home/mavros_test/catkin_ws/src/CMakeLists.txt" pointing to "/opt/ros/melodic/share/catkin/cmake/toplevel.cmake"
...
Configure ROS ENV
The ros_environment.sh file contains environment variables used by ROS.
Update the ROS_IP value to use your IP address on target (you can use ifconfig):
more /home/mavros_test/ros_environment.sh
#!/bin/bash
#
source /opt/ros/kinetic/setup.bash
source catkin_ws/install/setup.bash
unset ROS_HOSTNAME
# configure ROS IPs here
export ROS_MASTER_IP=127.0.0.1
export ROS_IP=192.168.8.1
export ROS_MASTER_URI=http://${ROS_MASTER_IP}:11311/
# mavros needs to know what PX4's system id is
export PX4_SYS_ID=1
Launch the simple-example Demo
You can do this on bench top if you’d like, but REMOVE THE PROPELLORS as this will arm the drone!
- Open an adb shell
- Run the following to launch the program
cd /home/mavros_test
./run_mavros_test.sh
You should get an output that ends similar to this:
...
INFO] [1663886683.264138601]: MAVROS started. MY ID 1.240, TARGET ID 1.1
[ INFO] [1663886683.264246359]: udp0: Remote address: 127.0.0.1:38711
[ INFO] [1663886683.264606406]: IMU: Attitude quaternion IMU detected!
[ INFO] [1663886683.265673318]: IMU: High resolution IMU detected!
[ WARN] [1663886683.267312670]: GP: No GPS fix
[ INFO] [1663886683.313571850]: CON: Got HEARTBEAT, connected. FCU: PX4 Autopilot
[ INFO] [1663886683.315295002]: IMU: High resolution IMU detected!
[ INFO] [1663886683.378609250]: IMU: Attitude quaternion IMU detected!
[ INFO] [1663886684.337418988]: GF: Using MISSION_ITEM_INT
[ INFO] [1663886684.337929605]: RP: Using MISSION_ITEM_INT
[ INFO] [1663886684.338302621]: WP: Using MISSION_ITEM_INT
[ INFO] [1663886684.338667459]: VER: 1.1: Capabilities 0x000000000000e4ef
[ INFO] [1663886684.339006205]: VER: 1.1: Flight software: 01041040 (33795a0a30000000)
[ INFO] [1663886684.339548645]: VER: 1.1: Middleware software: 01041040 (33795a0a30000000)
[ INFO] [1663886684.339894838]: VER: 1.1: OS software: 04137dff (e7701b9e792e3101)
[ INFO] [1663886684.340202177]: VER: 1.1: Board hardware: 00000001
[ INFO] [1663886684.340527172]: VER: 1.1: VID/PID: 0000:0000
[ INFO] [1663886684.340860813]: VER: 1.1: UID: 3044494530303030
[ WARN] [1663886684.341231173]: CMD: Unexpected command 520, result 0
[ INFO] [1663886687.929310850]: waiting for offboard mode
[ INFO] [1663886693.315015302]: HP: requesting home position
[ INFO] [1663886696.836791903]: RC_CHANNELS message detected!
[ INFO] [1663886698.315995312]: RP: mission received
[ INFO] [1663886698.317024880]: GF: mission received
[ INFO] [1663886698.317390396]: WP: mission received
[ INFO] [1663886703.314904662]: HP: requesting home position
[ INFO] [1663886707.538530390]: VER: 1.1: Capabilities 0x000000000000e4ef
[ INFO] [1663886707.538779396]: VER: 1.1: Flight software: 01041040 (33795a0a30000000)
[ INFO] [1663886707.538893405]: VER: 1.1: Middleware software: 01041040 (33795a0a30000000)
[ INFO] [1663886707.539031580]: VER: 1.1: OS software: 04137dff (e7701b9e792e3101)
[ INFO] [1663886707.539153506]: VER: 1.1: Board hardware: 00000001
[ INFO] [1663886707.539264337]: VER: 1.1: VID/PID: 0000:0000
[ INFO] [1663886707.539952557]: VER: 1.1: UID: 3044494530303030
[ WARN] [1663886707.540114325]: CMD: Unexpected command 512, result 0
[ INFO] [1663886707.708296390]: VER: 1.1: Capabilities 0x000000000000e4ef
[ INFO] [1663886707.708538834]: VER: 1.1: Flight software: 01041040 (33795a0a30000000)
[ INFO] [1663886707.708672791]: VER: 1.1: Middleware software: 01041040 (33795a0a30000000)
[ INFO] [1663886707.708817060]: VER: 1.1: OS software: 04137dff (e7701b9e792e3101)
[ INFO] [1663886707.708943881]: VER: 1.1: Board hardware: 00000001
[ INFO] [1663886707.709068618]: VER: 1.1: VID/PID: 0000:0000
[ INFO] [1663886707.709161221]: VER: 1.1: UID: 3044494530303030
[ INFO] [1663886708.451312390]: WP: seems GCS requesting mission
[ INFO] [1663886708.452393312]: WP: scheduling pull after GCS is done
[ INFO] [1663886708.566541986]: GF: seems GCS requesting mission
[ INFO] [1663886708.566864534]: GF: scheduling pull after GCS is done
[ INFO] [1663886708.610489220]: RP: seems GCS requesting mission
[ INFO] [1663886708.611010150]: RP: scheduling pull after GCS is done
[ INFO] [1663886713.314919596]: HP: requesting home position
[ WARN] [1663886713.449405269]: GP: No GPS fix
[ INFO] [1663886713.456587822]: WP: mission received
[ INFO] [1663886713.568093669]: GF: mission received
[ INFO] [1663886713.612369544]: RP: mission received
[ INFO] [1663886723.314870316]: HP: requesting home position
[ INFO] [1663886726.379315832]: arming
[ INFO] [1663886726.427174936]: FCU: Armed by external command
[ INFO] [1663886726.428385127]: Vehicle armed
[ INFO] [1663886726.476409542]: FCU: [logger] /data/px4/log/sess005/log001.ulg
[ INFO] [1663886731.379187081]: disarming
[ INFO] [1663886731.395421067]: FCU: Disarmed by external command
[ INFO] [1663886731.396092620]: Vehicle disarmed
[ INFO] [1663886731.396233503]: done
[mavros_test_node-3] process has finished cleanly
log file: /home/root/.ros/log/25b80dbe-3ac8-11ed-b22c-00c0caafc7f0/mavros_test_node-3*.log
...