VOXL 2 Offboard Sensors
Table of contents
External GPS (Mag / GNSS)
Hardware
Tested hardware:
- Holybro M9N GPS
- Matek PN ???
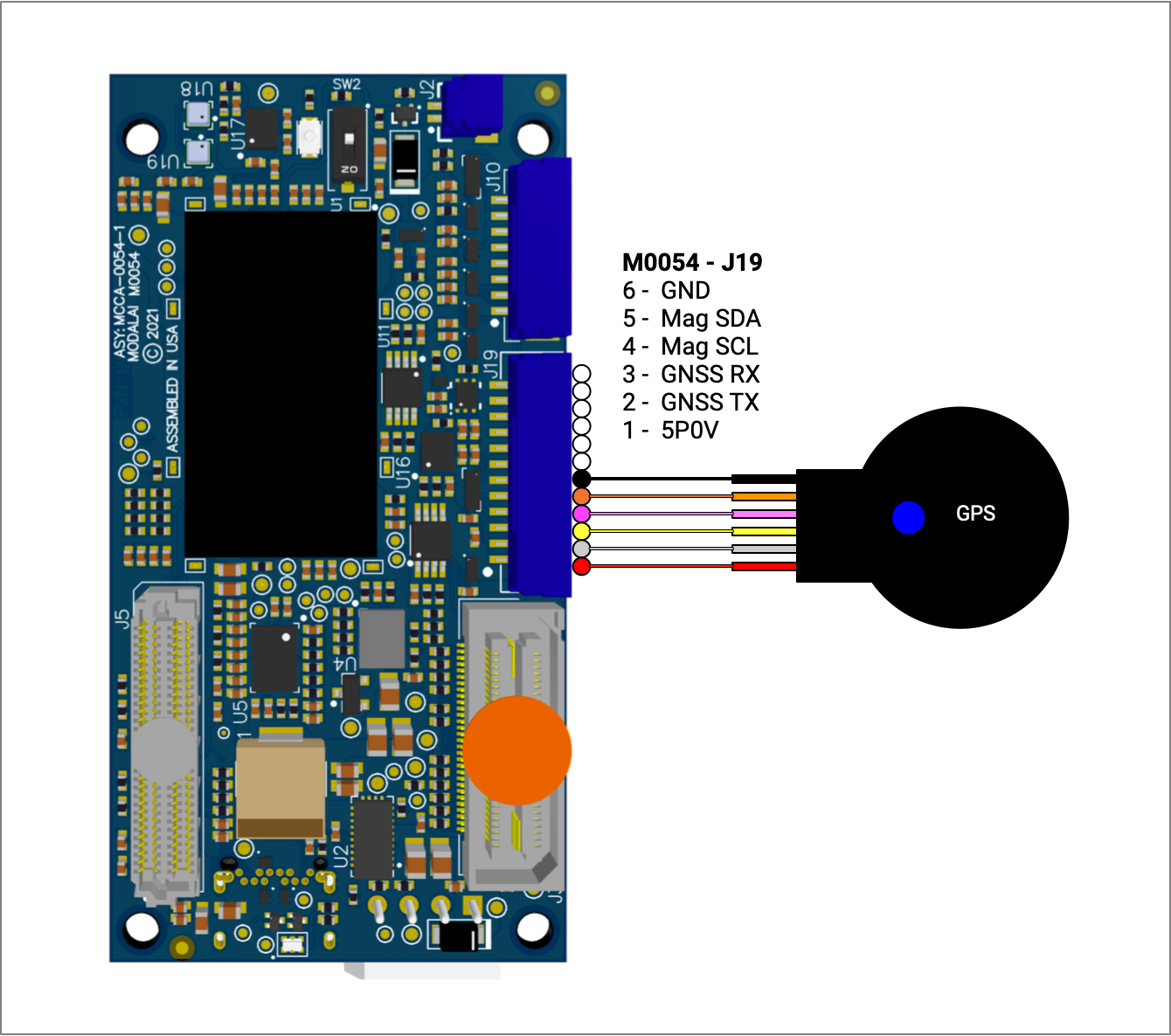
| Pin # | Signal Name | Notes |
|---|---|---|
| 1 | VDC_5V_LOCAL | GNSS/Mag power * |
| 2 | GNSS TX 3P3V | slpi_proc, SSC_QUP6 |
| 3 | GNSS RX 3P3V | slpi_proc, SSC_QUP6 |
| 4 | MAG SCL 3P3V | slpi_proc, SSC_QUP0 |
| 5 | MAG SDA 3P3V | slpi_proc, SSC_QUP0 |
| 6 | GND | |
| (others omitted) |
Software
Checking Sensor Status
You can check GPS and mag status using px4-listener sensor_gps and px4-listener sensor_mag
px4-listener sensor_gps
TOPIC: sensor_gps
sensor_gps_s
timestamp: 291194815 (0.136990 seconds ago)
time_utc_usec: 0
lat: 0
lon: 0
alt: -17000
alt_ellipsoid: 0
s_variance_m_s: 1000.0001
c_variance_rad: 3.1416
eph: 4294967.5000
epv: 3761869.7500
hdop: 99.9900
vdop: 99.9900
noise_per_ms: 103
jamming_indicator: 6
vel_m_s: 0.0000
vel_n_m_s: 0.0000
vel_e_m_s: 0.0000
vel_d_m_s: 0.0000
cog_rad: 0.0000
timestamp_time_relative: 0
heading: nan
heading_offset: 0.0000
fix_type: 0
jamming_state: 0
vel_ned_valid: False
satellites_used: 0
px4-listener sensor_mag
TOPIC: sensor_mag
sensor_mag_s
timestamp: 331057756 (0.032405 seconds ago)
timestamp_sample: 331057149 (607 us before timestamp)
device_id: 396809 (Type: 0x06, I2C:1 (0x0E))
x: 0.0765
y: 0.1121
z: 0.3333
temperature: nan
error_count: 0
is_external: True
PX4 Driver and Setup
See GPS driver here.
The default driver is Holybro and is set here
For Matek, see here