VOXL 2 - D0014 Architecture (Starling 2)
Table of contents
Hardware
VOXL2 - D0014-4-CXX-M22-TX
Summary
The Starling 2 D0014-4-CXX-M22-TX configuration consists of:
D0014-4- Starling 2 Family- VOXL ESC Mini with built in power management
- 120mm Folding Propellers, 1504 Brushless Motors, Single 2S battery
CXXC26- Dual AR0144, IMX412, LIOW2 TOFC27- Triple AR0144, IMX412, LIOW2 TOF
M22- WiFi modem configTXT7- ELRST9- Ghost
Block Diagram
Below describes the compute HW block diagram for the D0014-4-CXX-M22-TX configuration.
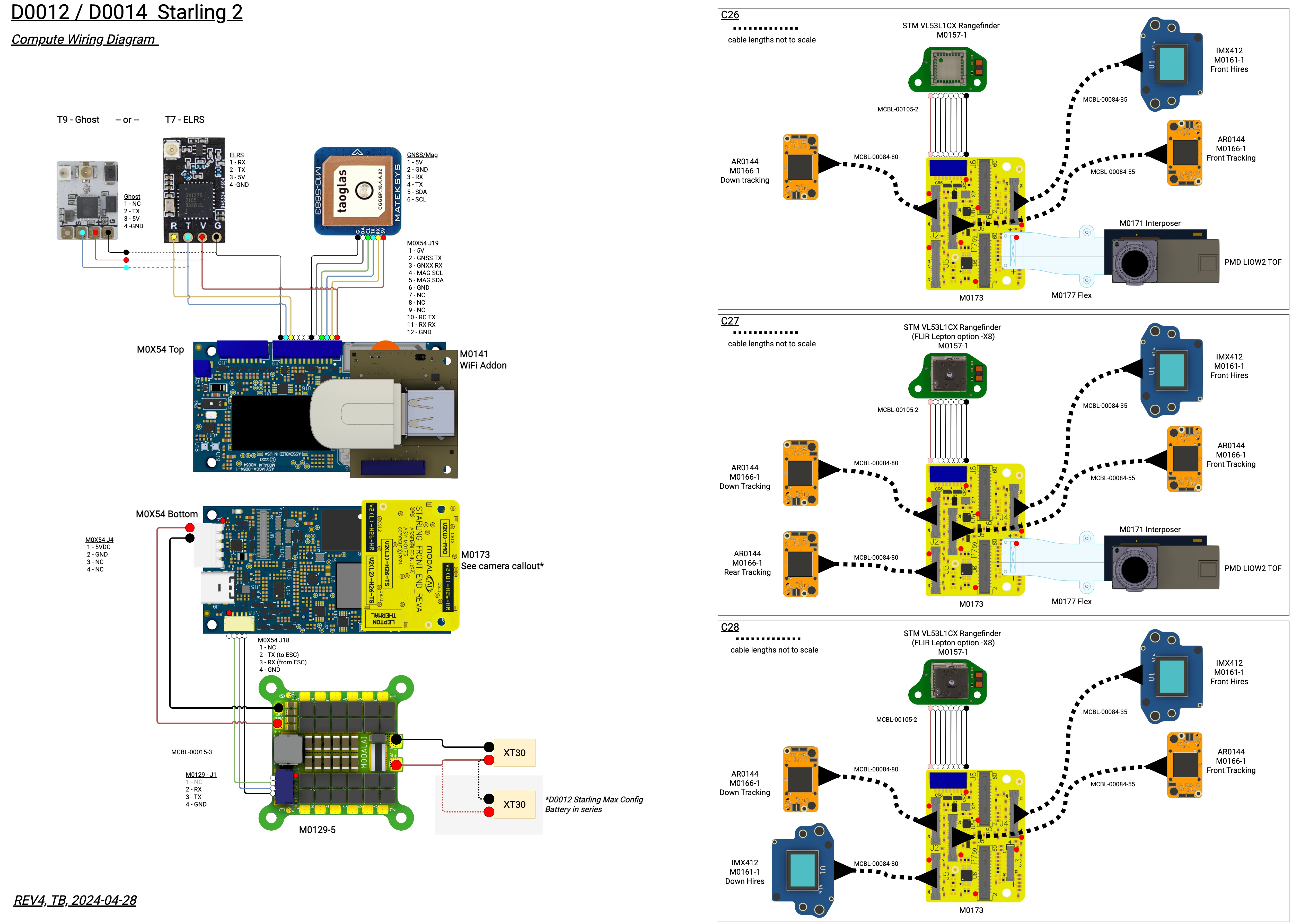
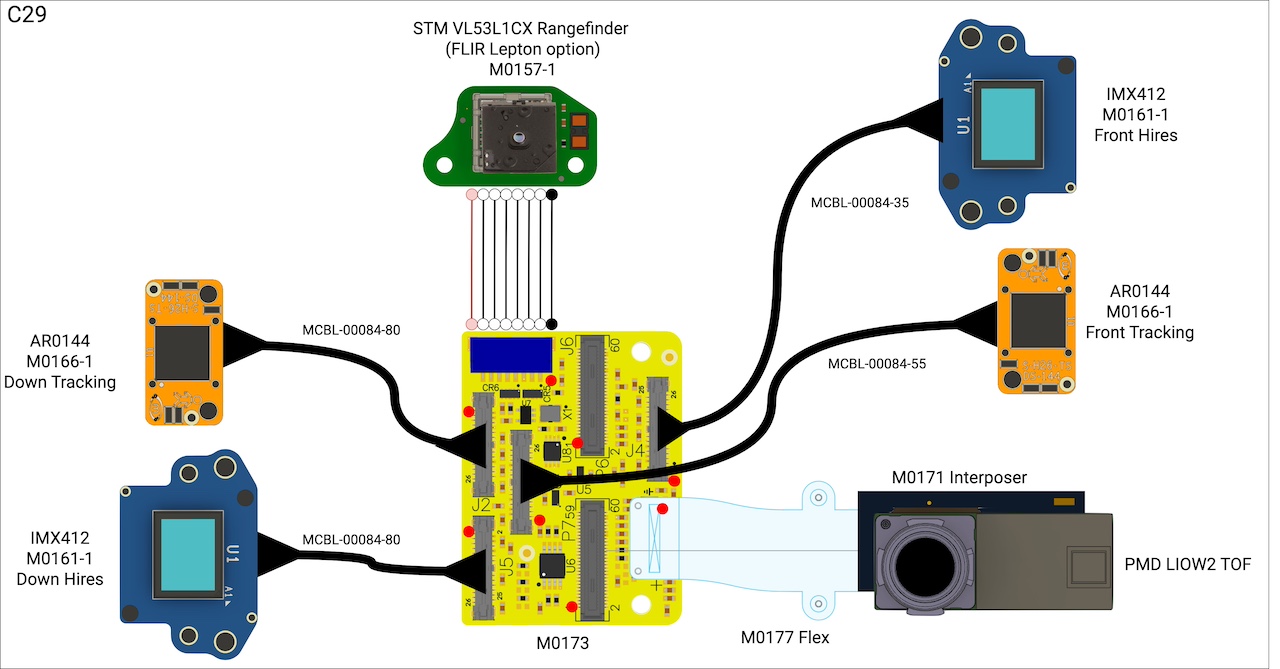
Additional camera configs:
VOXL2 - D0012-4-CXX-M22-TX
Summary
The Starling 2 Max D0012-4-CXX-M22-TX configuration consists of:
D0012-4- Starling 2 Family- VOXL ESC Mini with built in power management
- 180mm Tri-Blade Propellers, 2203.5 Brushless Motors, Dual 2S battery
CXXC28- Dual AR0144, Dual IMX412
M22- WiFi modem configTXT7- ELRST9- Ghost
Block Diagram
See above
Software
- Supported VOXL SDK: 1.3+
- Supported Kernels (config 1):
m0054-1-var00.1-kernel.img,m0054-2-var02.1-kernel.img
Platform Features
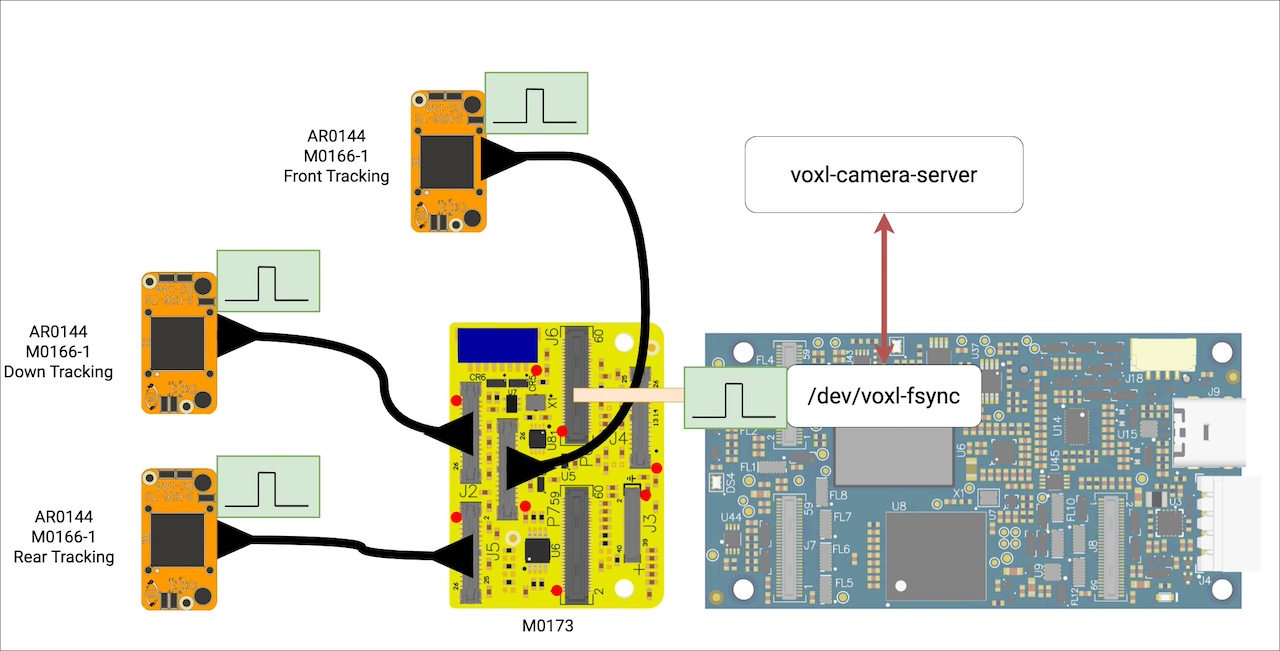
VOXL2 Driven Image Sensor Synchronization
In the D0014/D0012 architecture using the M0173 breakout, the following occurs for the tracking sensors:
- The voxl-fysnc-mod ships in SDK 1.3+ and defaults to use GPIO 109, 30Hz, and disabled.
- When a C26/C27/C8 image sensor configurations is setup using
voxl-configure-cameras, the config file at/etc/modalai/voxl-camera-server.confis setup with:
...
"fsync_en": true,
"fsync_gpio": 109,
...
- When camera server runs, it will use the
voxl-fsync-modparams exposed to the file system at/sys/module/voxl_fsync_mod/parameters, for exampleenabled,gpio_num, and enable the sync pulse at the default 30Hz. - When a C26/C27/C8 image sensor configurations is setup using
voxl-configure-cameras, theAR0144drivers are copied into/usr/lib/camerathat are setup for slave mode and will capture sychronized frames at the rate defined (note: the FPS should also be configured in/etc/modalai/voxl-camera-server.confaccordinly to ensure proper register settings are loaded)
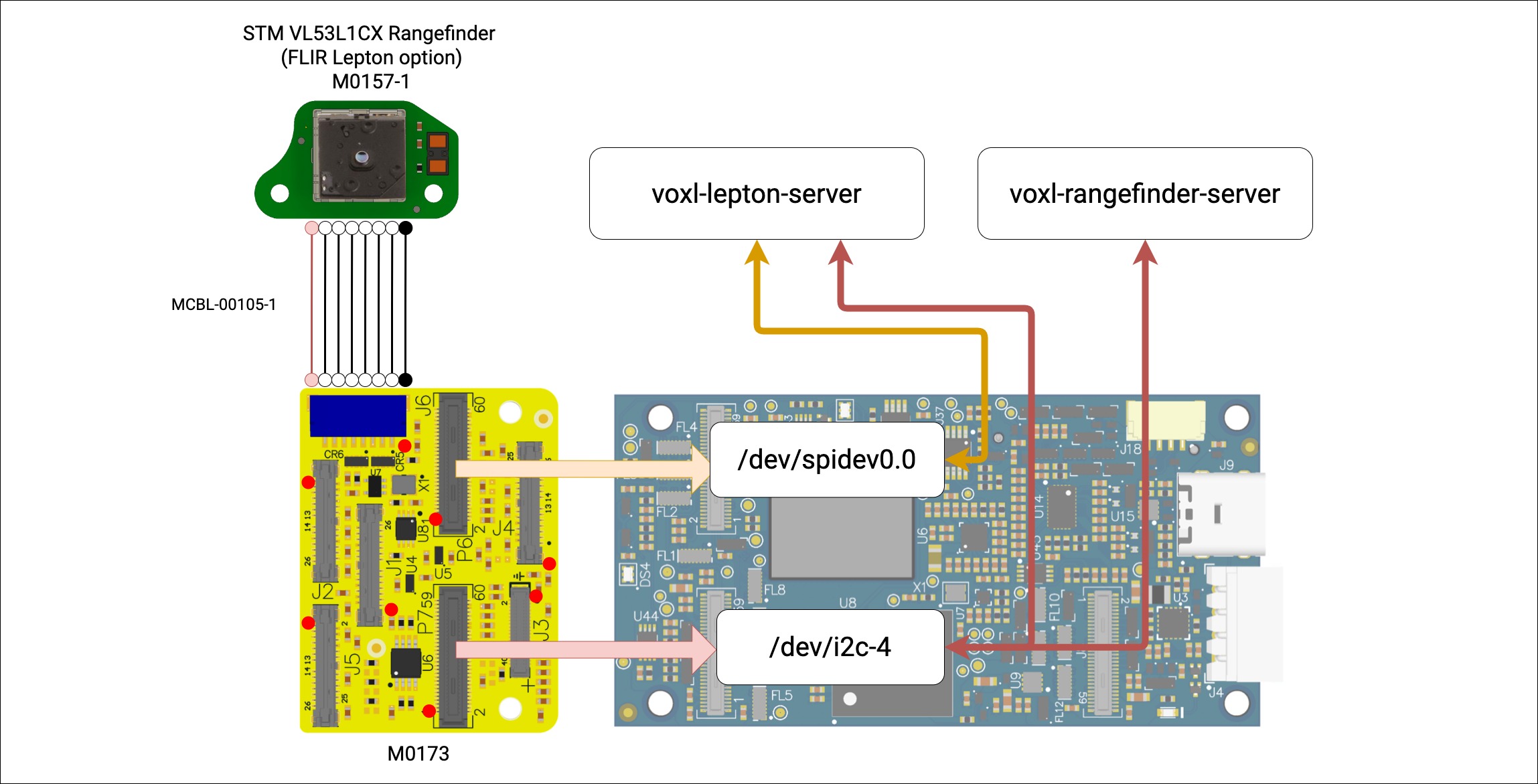
Downward Range Finder and FLIR Lepton
In the D0014/D0012 architecture using the M0173 breakout:
- VL53L1CX Range Finder is accesible over
/dev/i2c-4, see/etc/modalai/voxl-rangefinder-server.confandvoxl-rangefinder - Not supported in SDK 1.3.0 but coming soon, FLIR Lepton is accesible over
/dev/i2c-4and/dev/spidev0.0, see/etc/modalai/voxl-lepton-server.confandvoxl-lepton-server
New Kernel Configuration for M0173
The D0014/D0012 drone family uses the new kernel config 1 (as opposed to config 0). See /sys/module/voxl_platform_mod/parameters/config to verify proper kernel config.