VOXL Flight Functional Description
Table of contents
Overview
VOXL Flight combines VOXL and Flight Core into one package. This the first open computing platform designed specifically for drones (sUAS) to combine the power and sophistication of Snapdragon with the flexibility and ease of use of a STM32F7 in a single PCB. VOXL Flight is 100% software compatible with VOXL and Flight Core, but in a single PCB to reduce cabling, cost and increase reliability.
The VOXL advances the Snapdragon Flight and Qualcomm Flight Pro architectures for:
- PX4 Avoidance and Navigation
- ROS / ROS2
- Open source Linux kernel, cross-compilers, PX4, ROS, OpenCV
- Docker build environment for CPU, GPU (OpenCL) and DSP (Hexagon SDK) heterogeneous computer vision and deep learning processing.
- Run Docker on VOXL target for improved portability and maintenance.
- Add cellular LTE connectivity for beyond visual line of sight (add-on).
Specs Overview:
- Snapdragon 821: Quad-core up to 2.15GHz, GPU, 2xDSP, Linux
- 216MHz, 32-bit ARM M7 STM32F765II, PX4
- Video support: 3x MIPI cameras, UVC
- Machine vision support: time synchronized IMU and cameras
- Additional I/O: WiFi, SPI, I2C, UART, GPIO
- Light weight, powerful, SWAP-optimized computing:
- Weight 24g
- Power Adapter weight 13g
- Cameras (6g)
- Power consumption 3-10W
VOXL Flight combines VOXL and Flight Core exactly. Except for mechanical specifications, the datasheets for VOXL and Flight Core can be used for their respective functionalities on VOXL Flight.
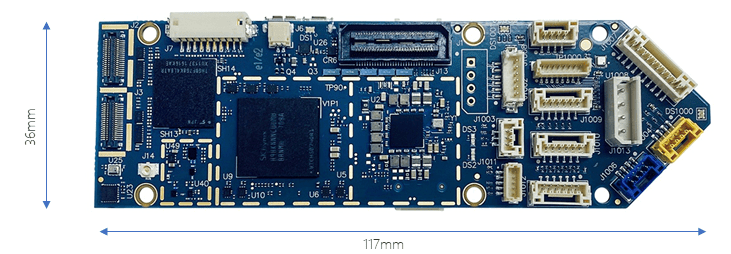
Mechanical Specs
3D Dimensions
Note: This was updated on 10/7/22 to fix the height of the CPU/Snapdragon part from 0.69mm to 1.3mm
2D Dimensions