Basic Tools and Utilities
This page demonstrates some basic utilities and tools that you will likely use to interact with VOXL’s services.
Note: For an extensive list of all tools, utilities, and commands available in the VOXL SDK, type voxl-{TAB}{TAB} to see all auto-complete options.
voxl-list-pipes



voxl-list-pipes is a simple tool to list all of the MPA (Modal Pipe Architecture) pipes currently available in the system. Running the command alone is identical to the command ls /run/mpa, but when giving it the -t or --mode-types flag, it will sort the pipes by type, allowing you to easily see which cameras/imus/etc are available in the system.
Example Output:
voxl2:/$ voxl-list-pipes -t
camera_image_metadata_t
hires
qvio_overlay
tof_conf
tof_depth
tof_ir
tof_noise
tracking
cpu_stats_t
cpu_monitor
imu_data_t
imu0
imu1
mavlink_message_tf
vvpx4_gps_raw_int
vvpx4_mavlink_io
vvpx4_sys_status
vvpx4_vehicle_gps
point_cloud_metadata_t
tof_pc
pose_vel_6dof_t
vvpx4_body_wrt_fixed
vvpx4_body_wrt_local
qvio_data_t
qvio_extended
text
vvpx4_shell
tof_data_t
tof
vio_data_t
qvio
voxl2:/$
The source code for this can be found here
voxl-inspect-imu
voxl-inspect-imu is a tool to check the imu measurements of the imus on voxl. It requires that voxl-imu-server is running in the background, which can be checked with voxl-inspect-services.
Arguments
Required
IMU: Which IMU to display data from. Available IMUs can be seen by typing voxl-inspect-imu {TAB}{TAB}.
Note: for VOXL 2, you should see available IMU’s as imu_apps. For VOXL and VOXL Flight, you should see imu0 and imu1
Optional
| Parameter | Description | Example |
|---|---|---|
| -a –all | Show all imu data, not scaled down for screen performance (this will print lines at ~1khz) | voxl-inspect-imu imu_apps -a |
| -h –help | Print help message | voxl-inspect-imu --help |
| -n –newline | Print each sample on a new line instead of updating the current output line | voxl-inspect-imu imu_apps -n |
Example Output
voxl2:/$ voxl-inspect-imu imu_apps
Acc in m/s^2, gyro in rad/s, temp in C
gravity| accl_x accl_y accl_z| gyro_x gyro_y gyro_z| Temp |
9.63 | 0.12 -9.57 1.08 | 0.01 0.02 0.00 | 35.03 |
Source code available on Gitlab.
voxl-inspect-cam
Note: only applicable if you have cameras connected to your VOXL.
The utility voxl-inspect-cam is a tool to check image metadata coming from MPA services that are publishing camera data. It requires that a service like voxl-camera-server is running in the background publishing camera, image, or video data. It can also be used to check non-camera images, such as the overlays coming out of VOXL TFLite Server or voxl-open-vins-server.
Arguments
Required
Cam: Which image to display data from. Available images can be seen by typing voxl-inspect-cam {TAB} {TAB}. Options that will regularly be available are: tracking, stereo, hires, tof_depth, tof_conf, tof_noise, tof_ir, dfs_disparity, qvio_overlay, tflite_overlay.
Optional
| Parameter | Description | Example |
|---|---|---|
| -h –help | Print help message | voxl-inspect-cam --help |
| -n –newline | Print each sample on a new line instead of updating the current output line | voxl-inspect-cam tracking -n |
| -t –test | Test mode, simple pass/fail test after two seconds of waiting for a frame | voxl-inspect-cam tracking -t |
Example Output
voxl2:/$ voxl-inspect-cam tracking
|size(bytes)| height | width |exposure(ms)| gain | frame id |latency(ms)|Framerate(hz)| format
| 307200 | 480 | 640 | 3.8 | 100 | 71976 | 18.6 | 30.0 | RAW8
voxl2:/$
Source code available on Gitlab.
voxl-inspect-battery
This tool subscribes to the /run/mpa/vvpx4_sys_status pipe published by voxl-mavlink-server which provides a copy of all SYS_STATUS mavlink messages received from a PX4 flight controller. Among other things, this packet contains battery status information.
Also note that voxl-portal subscribes to the same pipe and also shows battery percentage in the top right corner of the webpage.
Use
voxl2:/$ voxl-inspect-battery
Voltage | Charge | Current |
12.22V | 89% | 0.49A |
Troubleshooting
If no data is displayed, then either voxl-px4 or voxl-mavlink-server is not running (run voxl-inspect-services to check) or PX4 is not connected or operating.
Source code available on Gitlab.
voxl-inspect-cpu



voxl-inspect-cpu is a tool to check the CPU/GPU utilization and temperature of the various voxl components. It is part of the VOXL CPU Monitor package and subscribes to the cpu_monitor pipe. If you don’t get data using this tool, make sure the voxl-cpu-monitor systemd service is running using voxl-inspect-services. Additionally, to get a breakdown of CPU and memory utilization by process, use the linux command top instead.
Use
voxl:/$ voxl-inspect-cpu
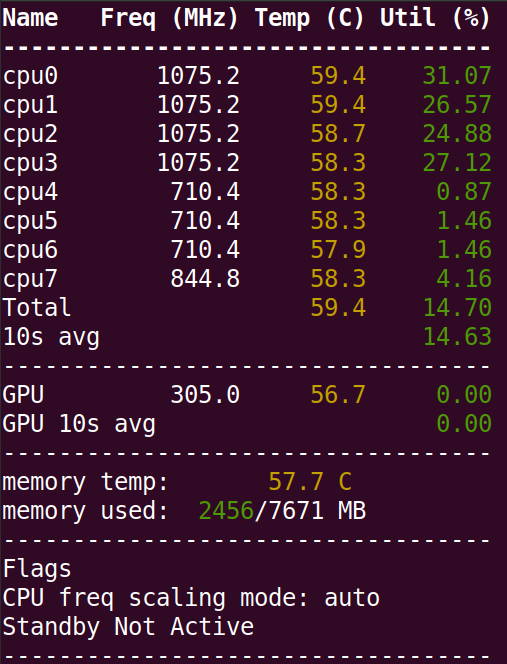
Source code available on Gitlab.