Flight Core Functional Description
Table of contents
Overview
ModalAI Flight Core is a PX4 flight controller that uses a very similar architecture to FMUv5x. It’s design goal is to be software compatible with the FMUv5x architecture in a smaller Pixracer-style form factor.
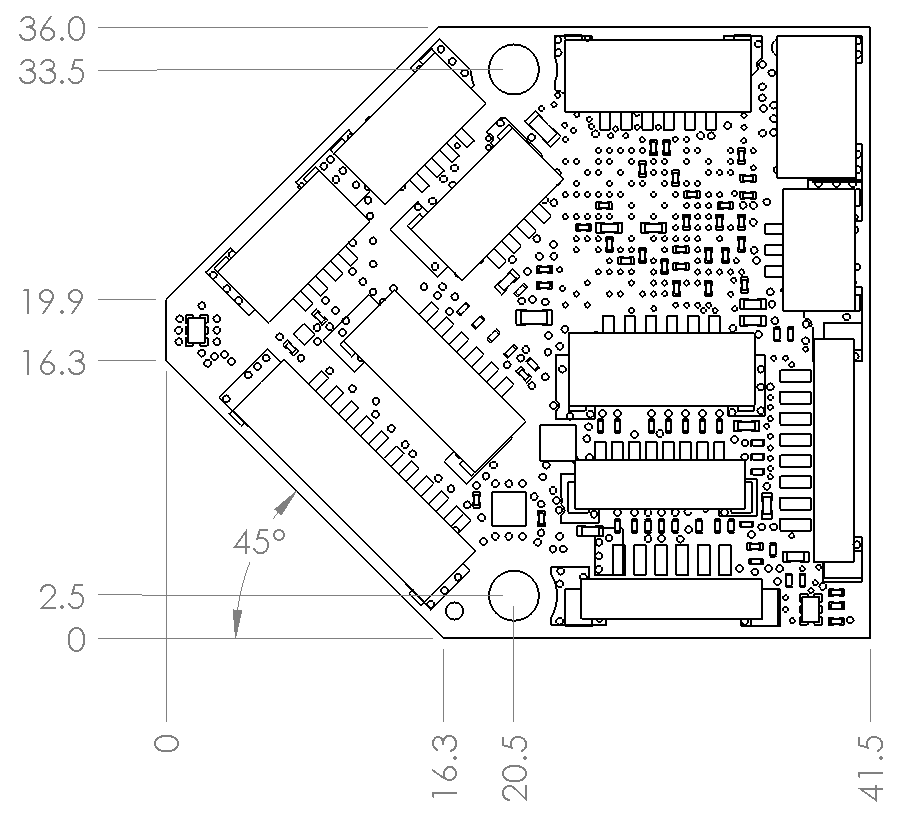
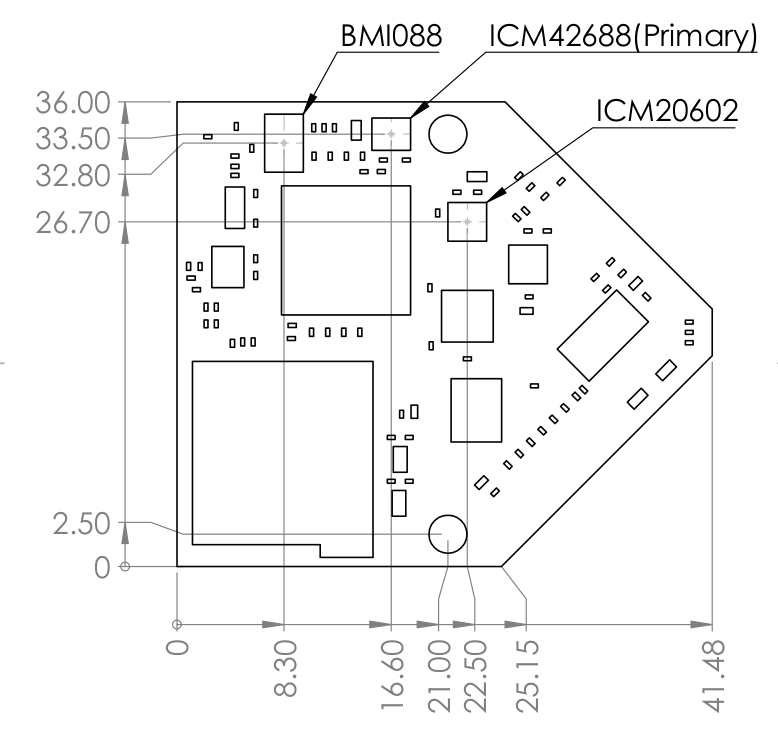
Dimensions
3D Drawings
2D Drawings
Features
| Feature | Details |
|---|---|
| Weight | 6 g |
| MCU | 216MHz, 32-bit ARM M7 STM32F765II |
| Memory | 256Kb FRAM |
| 2Mbit Flash | |
| 512Kbit SRAM | |
| Firmware | PX4 |
| IMUs | ICM-20602 (SPI1) |
| ICM-42688-P (SPI2) | |
| BMI088 (SPI6) | |
| Barometer | BMP388 (I2C4) |
| Secure Element | A71CH (I2C4) |
| microSD Card | PX4 Supported SD Cards SDHC version 2 up to 32GB |
| Inputs | GPS/Mag |
| Spektrum | |
| Telemetry | |
| CAN bus | |
| PPM | |
| Outputs | 6 LEDs (2xRGB) |
| 8 PWM Channels | |
| Extra Interfaces | 3 serial ports |
| I2C | |
| GPIO |
Block Diagram
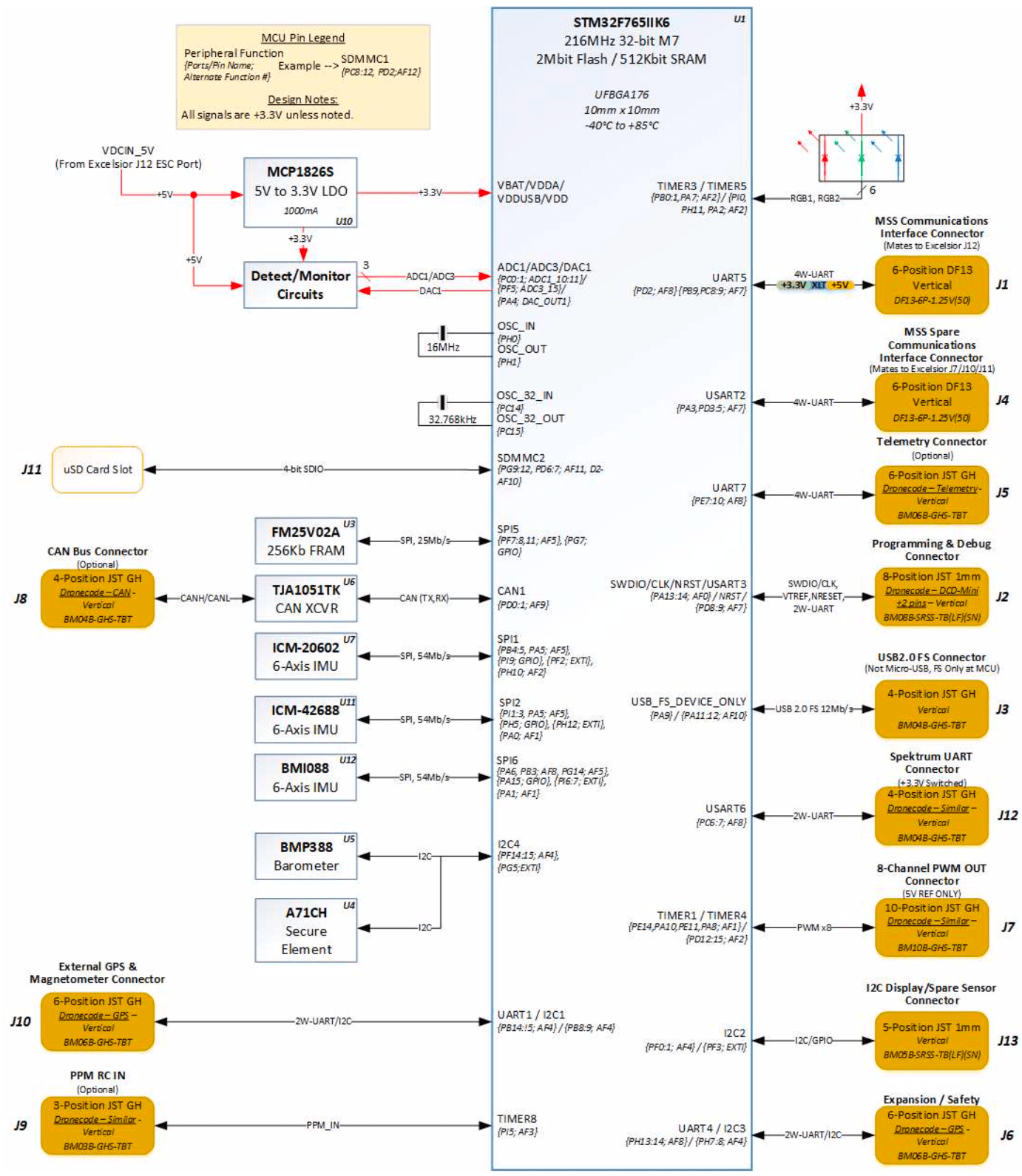 Figure 1
Figure 1
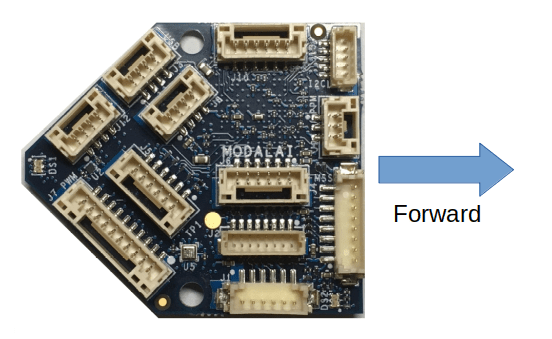
Orientation
The following is a ‘top down’ view of the Flight Core depicting the orientation. Starting in PX4 v1.11, the orientation is updated to better align with the usage of the VOXL-Flight. The following is a ‘top down’ view of the Flight Core depicting a ROTATION_NONE setup.
| PX4 Version | Orientation to Achieve Forward | Branch | Notes |
|---|---|---|---|
| 1.10 | ROTATION_YAW_180 | relesase/1.10 | Not Recommended |
| modalai_1.10 | ROTATION_NONE | modalai_1.10 | Recommended |
| master | ROTATION_NONE | master | In Development |
Power Supply
Recommended
A 5VDC supply is required to power the Flight Core. The FC-PM Power Module board is recommended, which provides battery voltage and amperage monitoring through an I2C interface when connected to J6 using the MCBL-00003 cable.
Other connectors also allow a 5VDC supply to be connected (see connectors page )
- J6 - recommended, provides I2C interace for monitoring
- J1/J4/J5
Power Usage
NOTE: The following is preliminary data.
Test configuration:
- Using a 5VDC supply
- Using PX4 this commit
| Use Case | Typical Usage (Peak) |
|---|---|
| Idle | 180 mA |
| Idle, with GPS (HolyBro Pixhawk 4, Second GPS) | 260 mA |
| Idle, with Spektrum DSMX | 200 mA |
| Idle, with Holybro Telemetry | 230 mA |
| Idle, with GPS/Spektrum/Telemetry | 330 mA |
Pixhawk is a registered trademark of Lorenz Meier.