Common definitions and utilities for the VOXL OpenVINS server. More...
#include <stdint.h>#include <vector>#include <opencv2/opencv.hpp>#include <functional>#include <Eigen/Core>#include <Eigen/Dense>#include <modal_pipe.h>#include <unistd.h>#include <time.h>#include <math.h>#include <string.h>#include <iomanip>#include <iostream>#include <fstream>
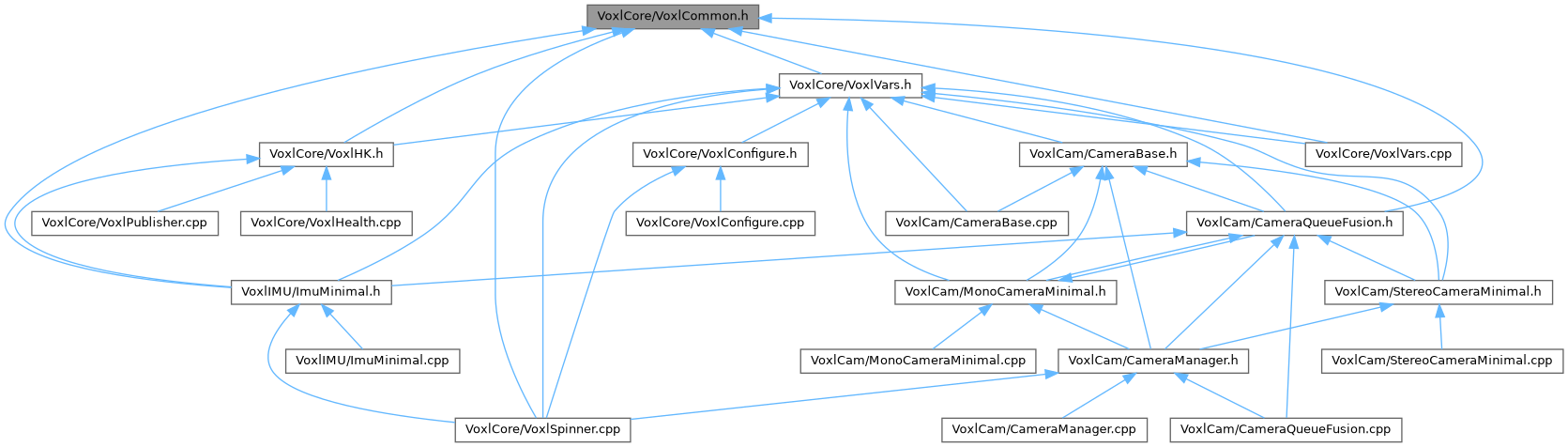
Go to the source code of this file.
Classes | |
| struct | cam_info |
| Camera information and calibration data. More... | |
Macros | |
| #define | CM_CHAR_BUF_SIZE 64 |
| Arbitrary string buffer size for names and identifiers. | |
| #define | DEG_TO_RAD (M_PI / 180.0) |
| Convert degrees to radians. | |
| #define | RAD_TO_DEG (180.0 / M_PI) |
| Convert radians to degrees. | |
Typedefs | |
| typedef enum camera_mode | camera_mode |
| typedef struct cam_info | cam_info |
Enumerations | |
| enum | camera_mode { UNKNOWN = -1 , MONO = 0 , STEREO = 1 , STEREO_LEFT_ONLY = 2 , STEREO_RIGHT_ONLY = 3 } |
| Camera operation modes for the VIO system. More... | |
Variables | |
| constexpr size_t | MAX_IMAGE_SIZE = 1280 * 800 * 3 * 2 |
| Maximum size for image data buffer. | |
Detailed Description
Common definitions and utilities for the VOXL OpenVINS server.
- Date
- 2025
- Version
- 1.0
This header file contains common definitions, data structures, and utility functions used throughout the VOXL OpenVINS server. It provides the foundation for camera management, IMU handling, and general system utilities.
The file includes:
- Camera mode enumerations and conversion functions
- Image data structures for tracking
- Camera information structures
- Utility functions for timing and memory management
- Mathematical helper functions
Definition in file VoxlCommon.h.
Macro Definition Documentation
◆ CM_CHAR_BUF_SIZE
| #define CM_CHAR_BUF_SIZE 64 |
Arbitrary string buffer size for names and identifiers.
Used for camera names, tracking names, and other string identifiers throughout the system.
Definition at line 50 of file VoxlCommon.h.
◆ DEG_TO_RAD
| #define DEG_TO_RAD (M_PI / 180.0) |
Convert degrees to radians.
Macro for converting angle measurements from degrees to radians.
Definition at line 58 of file VoxlCommon.h.
◆ RAD_TO_DEG
| #define RAD_TO_DEG (180.0 / M_PI) |
Convert radians to degrees.
Macro for converting angle measurements from radians to degrees.
Definition at line 67 of file VoxlCommon.h.
Enumeration Type Documentation
◆ camera_mode
| enum camera_mode |
Camera operation modes for the VIO system.
This enumeration defines the different camera modes supported by the system. The mode determines how multiple cameras are used in the visual-inertial odometry pipeline.
Definition at line 89 of file VoxlCommon.h.
Variable Documentation
◆ MAX_IMAGE_SIZE
|
constexpr |
Maximum size for image data buffer.
Calculated for 1280x800 resolution with 3 channels and 2 bytes per pixel
Definition at line 75 of file VoxlCommon.h.