Base packet structure for image data fed to trackers. More...
#include <VoxlCommon.h>
Public Attributes | |
| int64_t | timestamp_ns |
| Timestamp of image in nanoseconds. | |
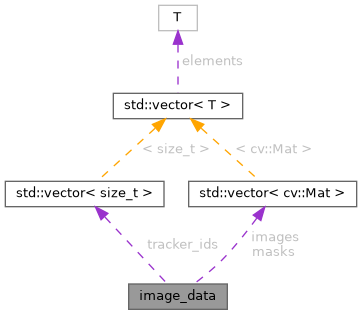
| std::vector< size_t > | tracker_ids |
| Vector of tracker IDs per camera, matching order of images + masks. | |
| std::vector< cv::Mat > | images |
| Vector of images to track across, in order matching ids vector. | |
| std::vector< cv::Mat > | masks |
| Vector of masks denoting regions of non-interest, in order matching ids vector Mask regions with val == 255 will be ignored in tracking process. | |
Detailed Description
Base packet structure for image data fed to trackers.
This structure contains all the necessary information for processing images in the VIO system, including timestamps, tracker identifiers, image data, and masking information.
The structure is used as the primary data container for all image processing operations in the tracking pipeline.
Definition at line 180 of file VoxlCommon.h.
Member Data Documentation
◆ images
| std::vector<cv::Mat> image_data::images |
Vector of images to track across, in order matching ids vector.
Definition at line 184 of file VoxlCommon.h.
◆ masks
| std::vector<cv::Mat> image_data::masks |
Vector of masks denoting regions of non-interest, in order matching ids vector Mask regions with val == 255 will be ignored in tracking process.
Definition at line 185 of file VoxlCommon.h.
◆ timestamp_ns
| int64_t image_data::timestamp_ns |
Timestamp of image in nanoseconds.
Definition at line 182 of file VoxlCommon.h.
◆ tracker_ids
| std::vector<size_t> image_data::tracker_ids |
Vector of tracker IDs per camera, matching order of images + masks.
Definition at line 183 of file VoxlCommon.h.
The documentation for this struct was generated from the following file:
- VoxlCore/VoxlCommon.h