Singleton class for publishing VIO data. More...
#include <VoxlHK.h>
Public Member Functions | |
| Publisher (const Publisher &)=delete | |
| Publisher & | operator= (const Publisher &)=delete |
| void | start () |
| Start the publisher. | |
| void | publish (std::shared_ptr< ov_msckf::State > state, const std::map< double, std::vector< std::shared_ptr< ov_core::Feature > > > &used_features_map={}) |
| Publish VIO data. | |
| void | stop () |
| Stop the publisher. | |
| bool | should_auto_reset (std::shared_ptr< ov_msckf::State > state, int quality, int n_features, double yawrate, double current_velocity, double vel_x, double vel_y) |
| Check if auto-reset should be triggered. | |
| double | calcQuality (const std::map< double, std::vector< std::shared_ptr< ov_core::Feature > > > &used_features_map, std::unordered_map< size_t, std::shared_ptr< ov_type::Landmark > > &slam_features, std::shared_ptr< ov_msckf::State > state) |
| Calculate Quality of the VIO state (async-aware per-camera freshness ledger) | |
| void | set_first_packet (bool first_packet_) |
| Set the first packet flag. | |
| void | publishBlank () |
Static Public Member Functions | |
| static Publisher & | getInstance () |
| Get singleton instance. | |
| static void | ov_vio_control_pipe_cb (int ch, char *string, int bytes, void *context) |
| Control pipe callback function. | |
Detailed Description
Singleton class for publishing VIO data.
This class manages the publication of VIO data to external systems through pipe interfaces. It implements the singleton pattern to ensure only one instance exists throughout the application lifecycle.
The publisher handles:
- VIO state data formatting
- Track base information
- Coordinate frame transformations
- Data packet generation and transmission
Member Function Documentation
◆ calcQuality()
| double Publisher::calcQuality | ( | const std::map< double, std::vector< std::shared_ptr< ov_core::Feature > > > & | used_features_map, |
| std::unordered_map< size_t, std::shared_ptr< ov_type::Landmark > > & | slam_features, | ||
| std::shared_ptr< ov_msckf::State > | state | ||
| ) |
Calculate Quality of the VIO state (async-aware per-camera freshness ledger)
Pools all used-feature entries from the last QUAL_UNION_WINDOW_S (dedup by featid) and scores each camera over the pooled set with the unchanged synced-path grid metric (5x5 grid, SLAM features weighted by covariance largest eigenvalue + quality field, MSCKF by quality field + track length), sum-then-clamp as sync always fused. The union gives each camera its full recent track set – one update's used list is a sparse, noisy sample – so async ticks score like synced batches; a time-constant EMA smooths the published value against single weak updates. Floor is 10 while running (the metric alone must not trip the sustained quality<1 auto-reset timers); resets/FAILED force 0/-1 in publish() itself.
Must only be called from the VIO thread (publish); uses the qual_ema state with no locks by design.
- Parameters
-
used_features_map Map of used features keyed by update (epoch) timestamp slam_features Map of SLAM features from the state state Current VIO state for covariance access
- Returns
- Quality score (10-100 while running, higher is better)
Definition at line 1541 of file VoxlPublisher.cpp.
References vio_manager.
Referenced by publish().

◆ getInstance()
|
inlinestatic |
Get singleton instance.
- Returns
- Reference to the singleton Publisher instance
Definition at line 137 of file VoxlHK.h.
Referenced by main(), and voxl::register_vio_camera_callback().

◆ ov_vio_control_pipe_cb()
|
static |
Control pipe callback function.
Control-pipe callback for VIO commands.
Callback function to handle control pipe messages
This function is invoked every time a message is received on the VIO control pipe.
- Parameters
-
ch Channel id supplied by the pipe framework. string Pointer to the received buffer. bytes Number of valid bytes in string.context User context pointer supplied during registration.
- Note
- Matching is performed with the
STR_MATCH()macro, which compares the prefix ofstringagainst the command literal.
Definition at line 93 of file VoxlPublisher.cpp.
References is_resetting, reset_requested, and soft_reset_requested.
◆ publish()
| void Publisher::publish | ( | std::shared_ptr< ov_msckf::State > | state, |
| const std::map< double, std::vector< std::shared_ptr< ov_core::Feature > > > & | used_features_map = {} |
||
| ) |
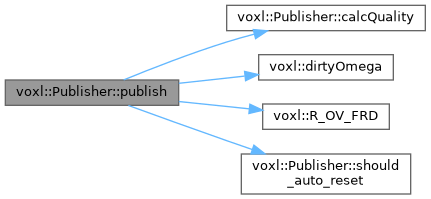
Publish VIO data.
Publish VIO data to external systems.
Publishes the current VIO state and tracking information to external systems through the configured pipe interfaces.
- Parameters
-
state Current VIO state used_features_map Used-features map, by reference (no copy). The caller runs on the VIO thread synchronously after the update, so the reference stays valid for the whole call; publish must never re-enter feed/drain.
This method formats and publishes the current VIO state and tracking information to external systems through the configured pipe interfaces.
The function performs the following operations:
- Formats VIO data packet with current state information
- Performs coordinate frame transformations (OpenVINS to FRD)
- Calculates angular velocity from quaternion differences
- Extracts and formats covariance matrices
- Handles camera-to-IMU extrinsic parameters
- Publishes both simple and extended VIO data packets
The coordinate frame transformation involves:
- Converting from OpenVINS coordinate frame to Front-Right-Down (FRD)
- Handling initialization state with NED rotation zeroing
- Applying proper quaternion and rotation matrix transformations
- Parameters
-
state Current VIO state containing pose, velocity, and covariance
Definition at line 151 of file VoxlPublisher.cpp.
References alt_z, auto_reset_max_v_cov_timeout_s, auto_reset_max_velocity, auto_reset_min_feature_timeout_s, auto_reset_min_features, calcQuality(), voxl::dirtyOmega(), en_debug, EXTENDED_CH, fast_yaw_thresh, fast_yaw_timeout_s, frame_transform, has_acc_jerk, is_resetting, non_static, ok_state_grace_timeout_s, quality_bad_to_good_count, quality_good_to_bad_count, quality_high_thresh, quality_initial_to_bad_count, quality_initial_to_good_count, quality_low_thresh_good, quality_low_thresh_initial, voxl::R_OV_FRD(), reset_num_counter, reset_requested, should_auto_reset(), SIMPLE_CH, vio_error_codes, vio_manager, and vio_state.
Referenced by voxl::register_vio_camera_callback().

◆ publishBlank()
| void Publisher::publishBlank | ( | ) |
Definition at line 1654 of file VoxlPublisher.cpp.
◆ set_first_packet()
|
inline |
◆ should_auto_reset()
| bool Publisher::should_auto_reset | ( | std::shared_ptr< ov_msckf::State > | state, |
| int | quality, | ||
| int | n_features, | ||
| double | yawrate, | ||
| double | current_velocity, | ||
| double | vel_x, | ||
| double | vel_y | ||
| ) |
Check if auto-reset should be triggered.
Evaluates current VIO state and error conditions to determine if an automatic reset should be triggered.
- Parameters
-
state Current VIO state quality Current quality value n_features Number of tracked features yawrate Calculated yaw rate from angular velocity current_velocity Current velocity magnitude vel_x X-component of velocity vel_y Y-component of velocity
- Returns
- true if auto-reset should be triggered, false otherwise
This function evaluates the current VIO state and various error conditions to determine if an automatic reset should be triggered. It implements the same logic as the legacy code but in a more modular way.
- Parameters
-
state Current VIO state quality Current quality value n_features Number of tracked features
- Returns
- true if auto-reset should be triggered, false otherwise
Definition at line 1147 of file VoxlPublisher.cpp.
References auto_reset_max_v_cov_timeout_s, auto_reset_max_velocity, auto_reset_min_feature_timeout_s, auto_reset_min_features, en_auto_reset, en_debug, fast_yaw_thresh, fast_yaw_timeout_s, and reset_num_counter.
Referenced by publish().

◆ start()
| void Publisher::start | ( | ) |
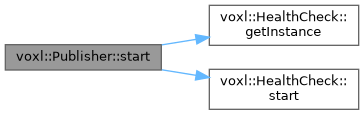
Start the publisher.
Initializes the publisher and prepares it for data transmission.
Initializes the publisher and prepares it for data transmission. Sets the first_packet flag to true to handle the initial angular velocity calculation.
Definition at line 53 of file VoxlPublisher.cpp.
References voxl::HealthCheck::getInstance(), voxl::HealthCheck::start(), and vio_state.
Referenced by main().

◆ stop()
| void Publisher::stop | ( | ) |
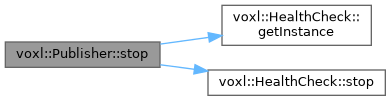
Stop the publisher.
Stops the publisher and cleans up resources.
Stops the publisher and cleans up resources. Currently a placeholder for future cleanup operations.
Definition at line 71 of file VoxlPublisher.cpp.
References voxl::HealthCheck::getInstance(), and voxl::HealthCheck::stop().
The documentation for this class was generated from the following files:
- VoxlCore/VoxlHK.h
- VoxlCore/VoxlPublisher.cpp