Camera queue fusion system for VOXL OpenVINS. More...
#include <vector>#include <memory>#include <mutex>#include <atomic>#include <iostream>#include <condition_variable>#include <deque>#include <thread>#include <opencv2/opencv.hpp>#include "VoxlVars.h"#include "VoxlCommon.h"#include "CameraBase.h"#include "MonoCameraMinimal.h"
Include dependency graph for CameraQueueFusion.h:

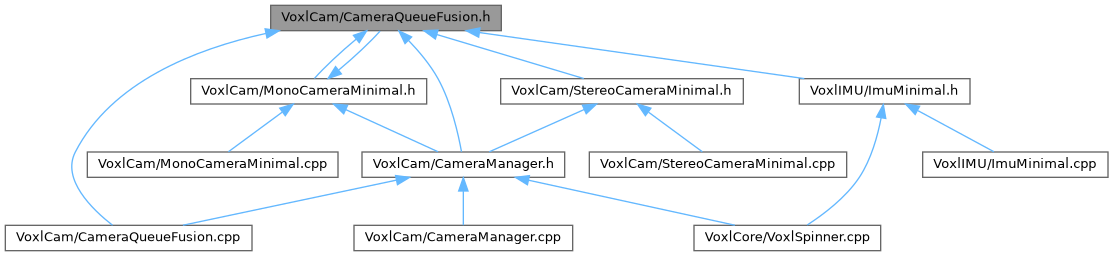
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | CameraQueueFusion |
| Camera queue fusion system for multi-camera synchronization. More... | |
Variables | |
| constexpr size_t | MAX_CAMERA_COUNT = 6 |
| Maximum number of cameras supported. | |
Detailed Description
Camera queue fusion system for VOXL OpenVINS.
- Date
- 2025
- Version
- 1.0
This header defines the camera queue fusion system that synchronizes and combines data from multiple cameras. It provides temporal alignment and batch processing capabilities for multi-camera VIO systems.
Definition in file CameraQueueFusion.h.
Variable Documentation
◆ MAX_CAMERA_COUNT
|
constexpr |
Maximum number of cameras supported.
Limited by 32-bit mask implementation for camera ready tracking
Definition at line 44 of file CameraQueueFusion.h.
Referenced by CameraQueueFusion::markCameraReady(), and CameraQueueFusion::start().