Main server implementation for VOXL OpenVINS. More...
#include <core/VioManager.h>#include <core/VioManagerOptions.h>#include "ImuMinimal.h"#include "CameraManager.h"#include <modal_pipe.h>#include <modal_json.h>#include <modal_flow.h>#include <voxl_common_config.h>#include "VoxlCommon.h"#include "VoxlVars.h"#include "VoxlVioIngest.h"#include "VoxlConfigure.h"#include <unistd.h>#include <signal.h>#include <sched.h>#include <getopt.h>
Go to the source code of this file.
Functions | |
| int | main (int argc, char *argv[]) |
| Main entry point for VOXL OpenVINS server. | |
Detailed Description
Main server implementation for VOXL OpenVINS.
- Date
- 2025
- Version
- 1.0
This file contains the main server implementation for the VOXL OpenVINS system. It handles initialization, pipe management, signal handling, and the main event loop.
The server provides:
- VIO system initialization and configuration
- Pipe-based communication with sensors and clients
- Signal handling for graceful shutdown
- Resource management and cleanup
- Main event loop for continuous operation
The server architecture follows a producer-consumer pattern where:
- IMU and camera data are received through pipe clients
- VIO processing is performed by the OpenVINS library
- Results are published through pipe servers to external clients
- System state is managed through atomic variables and mutexes
Definition in file VoxlSpinner.cpp.
Function Documentation
◆ main()
| int main | ( | int | argc, |
| char * | argv[] | ||
| ) |
Main entry point for VOXL OpenVINS server.
This function initializes the VIO system, sets up pipe communications, configures signal handling, and runs the main event loop. It handles the complete lifecycle of the VIO server from startup to shutdown.
The main function performs the following operations:
- Loads and validates server configuration files
- Synchronizes camera configurations with system services
- Creates and configures the VIO manager with OpenVINS
- Sets up process management (PID file, signal handling)
- Configures process priority and CPU affinity
- Creates server pipes for data output
- Connects to client pipes (IMU and cameras)
- Runs the main event loop until shutdown is requested
The function implements a robust initialization sequence that ensures all components are properly configured before starting the main loop. It also handles graceful shutdown through signal handling.
- Parameters
-
argc Number of command line arguments (currently unused) argv Array of command line argument strings (currently unused)
- Returns
- 0 on successful execution, non-zero on error
- Note
- The function uses _exit() for termination, so normal return paths are not reached. This ensures immediate process termination.
Definition at line 390 of file VoxlSpinner.cpp.
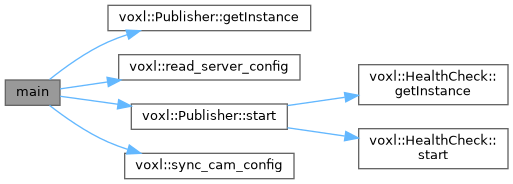
References config_only, en_debug, en_imu_body, en_verbose, folder_base, g_stereo_calib, voxl::Publisher::getInstance(), main_running, PROCESS_NAME, voxl::read_server_config(), voxl::register_vio_camera_callback(), voxl::Publisher::start(), stereo_z_max, stereo_z_min, voxl::sync_cam_config(), vio_error_codes, vio_manager, vio_manager_options, and vio_state.